Lernziele
- Beschreiben Sie die Bewegung der gedämpften harmonischen Bewegung
- Schreiben Sie die Bewegungsgleichungen für gedämpfte harmonische Schwingungen
- Beschreiben Sie die Bewegung der getriebenen, oder erzwungenen, gedämpften harmonischen Bewegung
- Beschreiben Sie die Bewegungsgleichungen für erzwungene, gedämpfte harmonische Bewegung
In der realen Welt folgen Schwingungen selten einer echten SHM. Reibung irgendeiner Art dämpft normalerweise die Bewegung, so dass sie abklingt oder mehr Kraft benötigt, um fortzufahren. In diesem Abschnitt werden wir einige Beispiele für gedämpfte harmonische Bewegungen untersuchen und sehen, wie man die Bewegungsgleichungen modifizieren kann, um diesen allgemeineren Fall zu beschreiben.
Eine Gitarrensaite hört einige Sekunden nach dem Anzupfen auf zu schwingen. Um auf einer Spielplatzschaukel weiter zu schwingen, muss man weiter schieben (Abbildung \(\PageIndex{1}\)). Obwohl wir die Reibung und andere nicht-konservative Kräfte oft klein oder vernachlässigbar machen können, ist eine völlig ungedämpfte Bewegung selten. Tatsächlich möchten wir vielleicht sogar Schwingungen dämpfen, wie bei Stoßdämpfern im Auto.

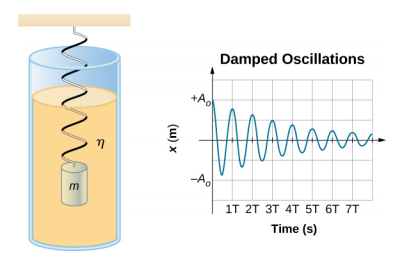
Abbildung \(\PageIndex{2}\) zeigt eine Masse m, die an einer Feder mit einer Kraftkonstante k befestigt ist. Die Masse wird bis zu einer Position A0, der Anfangsamplitude, angehoben und dann losgelassen. Die Masse schwingt um die Gleichgewichtslage in einer Flüssigkeit mit Viskosität, wobei die Amplitude bei jeder Schwingung abnimmt. Für ein System mit einer geringen Dämpfung sind die Periode und die Frequenz konstant und entsprechen nahezu der SHM, aber die Amplitude nimmt wie gezeigt allmählich ab. Dies geschieht, weil die nicht-konservative Dämpfungskraft dem System Energie entzieht, normalerweise in Form von thermischer Energie.
Betrachten Sie die auf die Masse wirkenden Kräfte. Beachten Sie, dass der einzige Beitrag der Masse darin besteht, die Gleichgewichtslage zu verändern, wie bereits weiter oben im Kapitel besprochen. Daher ist die Nettokraft gleich der Kraft der Feder und der Dämpfungskraft (\(F_D\)). Wenn der Betrag der Geschwindigkeit klein ist, d. h. die Masse schwingt langsam, ist die Dämpfungskraft proportional zur Geschwindigkeit und wirkt entgegen der Bewegungsrichtung (\(F_D = -b\)). Die Nettokraft auf die Masse ist daher
Schreibt man dies als Differentialgleichung in x, erhält man
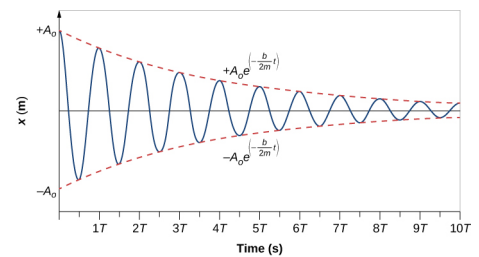
Um die Lösung dieser Gleichung zu bestimmen, betrachten Sie den in Abbildung \(\PageIndex{3}\) gezeigten Verlauf von Position gegen Zeit. Die Kurve ähnelt einer Kosinuskurve, die in der Einhüllenden einer Exponentialfunktion \(A_0e^{-\alpha t}\) schwingt, wobei \(\alpha = \frac{b}{2m}\). Die Lösung ist
Es bleibt als Übung, zu beweisen, dass dies tatsächlich die Lösung ist. Um zu beweisen, dass es die richtige Lösung ist, nimmt man die erste und zweite Ableitung nach der Zeit und setzt sie in Gleichung 15.23 ein. Es zeigt sich, dass Gleichung 15.24 die Lösung ist, wenn
Erinnern Sie sich, dass die Winkelfrequenz einer Masse, die einer SHM unterliegt, gleich der Quadratwurzel der Kraftkonstante geteilt durch die Masse ist. Dies wird oft als die Eigenwinkelfrequenz bezeichnet, die wie folgt dargestellt wird
Die Winkelfrequenz für eine gedämpfte harmonische Bewegung wird
Erinnern Sie sich, dass wir zu Beginn dieser Beschreibung der gedämpften harmonischen Bewegung festgestellt haben, dass die Dämpfung klein sein muss. Zwei Fragen drängen sich auf. Warum muss die Dämpfung klein sein? Und wie klein ist klein? Wenn Sie die Dämpfung in einem System allmählich erhöhen, beginnen sich Periode und Frequenz zu verändern, weil die Dämpfung der Hin- und Herbewegung entgegenwirkt und sie somit verlangsamt. (Die Nettokraft ist in beiden Richtungen kleiner.) Bei sehr großer Dämpfung schwingt das System gar nicht mehr – es bewegt sich langsam in Richtung Gleichgewicht. Die Kreisfrequenz ist gleich
Wenn b zunimmt, wird \(\frac{k}{m} – \left(\dfrac{b}{2m}\right)^{2}\) kleiner und erreicht schließlich Null, wenn b = \(\sqrt{4mk}\). Wenn b noch größer wird, wird \(\frac{k}{m} – \left(\dfrac{b}{2m}\right)^{2}\) eine negative Zahl und \(\sqrt{\frac{k}{m} – \left(\dfrac{b}{2m}\right)^{2}}) ist eine komplexe Zahl.
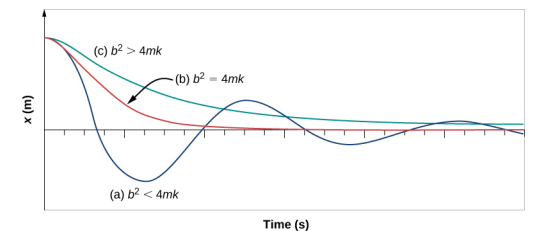
Abbildung \(\PageIndex{4}\) zeigt die Auslenkung eines harmonischen Oszillators für verschiedene Beträge der Dämpfung.
- Wenn die Dämpfungskonstante klein ist, b < \(\sqrt{4mk}\), schwingt das System, während die Amplitude der Bewegung exponentiell abfällt. Dieses System wird als unterdämpft bezeichnet, wie in Kurve (a). Viele Systeme sind unterdämpft und schwingen, während die Amplitude exponentiell abnimmt, wie z. B. die Masse, die auf einer Feder schwingt. Die Dämpfung kann recht klein sein, aber schließlich kommt die Masse zur Ruhe.
- Wenn die Dämpfungskonstante \(b = \sqrt{4mk}\) ist, wird das System als kritisch gedämpft bezeichnet, wie in Kurve (\(b\)). Ein Beispiel für ein kritisch gedämpftes System sind die Stoßdämpfer in einem Auto. Es ist von Vorteil, wenn die Schwingungen so schnell wie möglich abklingen. Hier schwingt das System nicht, sondern nähert sich asymptotisch so schnell wie möglich dem Gleichgewichtszustand.
- Kurve (c) in Abbildung \(\PageIndex{4}\) stellt ein überdämpftes System dar, bei dem \(b > \sqrt{4mk}\). Ein überdämpftes System nähert sich dem Gleichgewicht über einen längeren Zeitraum an.
Eine kritische Dämpfung ist oft erwünscht, da ein solches System schnell ins Gleichgewicht zurückkehrt und auch im Gleichgewicht bleibt. Außerdem bringt eine konstante Kraft, die auf ein kritisch gedämpftes System ausgeübt wird, das System in kürzester Zeit in eine neue Gleichgewichtslage, ohne dass es überschwingt oder um die neue Lage schwingt.
Übungsaufgabe \(\PageIndex{1}\)
Warum sind völlig ungedämpfte harmonische Oszillatoren so selten?
Beitragende und Namensnennung
-
Samuel J. Ling (Truman State University), Jeff Sanny (Loyola Marymount University) und Bill Moebs mit vielen beitragenden Autoren. Dieses Werk ist lizenziert von OpenStax University Physics unter einer Creative Commons Attribution License (by 4.0).