Die Frage wird oft gestellt: „Was ist die Normal- oder Standardform des PID-Algorithmus (proportional-integral-derivativ)?“
Die Antwort ist sowohl einfach als auch komplex. Bevor wir uns mit der Antwort beschäftigen, betrachten wir die unten gezeigten Bildschirmdarstellungen (klicken Sie für eine Großansicht von Beispiel 1 oder Beispiel 2):
 |
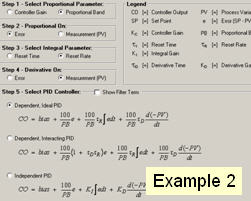 |
Wie in den Bildschirmdarstellungen gezeigt:
▪ Es gibt drei gängige PID-Algorithmusformen (siehe Schritt 5 in den großen Bildansichten).
▪ Jeder der drei Algorithmen verfügt über Tuning-Parameter und Algorithmus-Variablen, die auf unterschiedliche Weise gecastet werden können (siehe Schritt 1 – 4 in den großen Bildansichten).
So könnte Ihr Anbieter eine von Dutzenden möglichen Algorithmus-Formen verwenden. Und wenn Sie Ihrer Steuerung einen Filterbegriff hinzufügen, erhöht sich die Anzahl der Möglichkeiten erheblich.
Die einfache Antwort
Jeder der Algorithmen kann die gleiche Leistung wie jeder der anderen liefern. Es gibt keinen Steuerungsvorteil, eine Form gegenüber einer anderen zu wählen. In diesem Sinne sind sie alle Standard oder normal.
Wenn Sie einen Kauf in Erwägung ziehen, wählen Sie den Anbieter, der Ihre Bedürfnisse am besten erfüllt und halten Sie sich nicht mit den Besonderheiten des Algorithmus auf. Einige Dinge, die Sie berücksichtigen sollten, sind:
▪ Kompatibilität mit bestehenden Steuerungen und zugehöriger Hard- und Software
▪ Kosten
▪ Einfache Installation und Wartung
▪ Zuverlässigkeit
▪ Ihre Betriebsumgebung (ist sie sauber? kühl? trocken?)
Eine vollständigere Antwort
Die meisten der verschiedenen Formen des Steuerungsalgorithmus finden sich in den Produkten des einen oder anderen Herstellers. Einige Hersteller verwenden sogar verschiedene Formen innerhalb ihrer eigenen Produktlinien. Weitere Informationen finden Sie in diesem Artikel.
Und obwohl die verschiedenen Formen gleichermaßen leistungsfähig sind, muss jede von ihnen mit Hilfe von Abstimmungskorrelationen, die speziell für den jeweiligen Regelalgorithmus entwickelt wurden, abgestimmt werden (die Werte für die einstellbaren Parameter müssen angegeben werden).
Kommerzielle Software macht es einfach, die gewünschte Leistung aus jeder von ihnen zu erhalten. Es ist jedoch wichtig, dass Sie den Hersteller und die Modellnummer des Reglers kennen, um eine korrekte Übereinstimmung zwischen der Reglerform und den berechneten Abstimmwerten sicherzustellen.
Die Alternative zu einer geordneten Entwurfsmethodik ist ein „Raten und Testen“-Ansatz. Obwohl sie von einigen Praktikern verwendet wird, vergeudet eine solche Abstimmung nach dem Prinzip „Versuch und Irrtum“ wertvolle Produktionszeit, verbraucht mehr Roh- und Hilfsstoffe als nötig, erzeugt zusätzlichen Abfall und nicht spezifikationsgerechtes Produkt und kann sogar Sicherheitsbedenken hervorrufen.
In den meisten Artikeln auf Controlguru.com verwenden wir eine Variation der abhängigen, idealen PID-Reglerform:

Wobei:
CO = Reglerausgangssignal
CObias = Reglervorspannung
e(t) = aktueller Reglerfehler, definiert als SP – PV
SP = Sollwert
PV = gemessene Prozessgröße
Kc = Reglerverstärkung, ein Tuning-Parameter
Ti = Nachstellzeit, ein Tuning-Parameter
Td = Vorhaltezeit, ein Tuning-Parameter
Um zu verdeutlichen, dass die Regler alle gleich gut sind, verwenden wir gelegentlich Variationen der abhängigen, interagierenden Form:

oder Variationen der unabhängigen PID-Form:

Abschließende Überlegungen
Die obige Diskussion beschönigt einige der subtilen Unterschiede in der Form des Algorithmus, die wir ausnutzen können, um die Regelungsleistung zu verbessern. Wir werden diese Details kennenlernen, wenn wir in unserem Lernprozess fortschreiten.
Zum Beispiel verhält sich die Ableitung nach Fehler anders als die Ableitung nach gemessener PV. Dies gilt für alle Algorithmen. Die Ableitung nach Fehler kann nach Sollwertschritten „kicken“, und dies wird selten als wünschenswertes Verhalten angesehen. Daher wird die Ableitung nach PV für industrielle Anwendungen empfohlen.
Und wenn Sie erwägen, den Regler selbst zu programmieren, ist nicht die Form des Algorithmus die Herausforderung. Die große Hürde ist die korrekte Berücksichtigung der Anti-Reset-Windup- und Mantellogik, um einen stoßfreien Übergang zwischen den Betriebsarten zu ermöglichen.