Schrittmotortypen – Aufbau, Funktionsweise und Anwendungen
Inhaltsverzeichnis
Die Erfindung spezieller Schrittmotortreiberkarten und anderer digitaler Steuerungstechnologien für die Anbindung eines Schrittmotors an PC-basierte Systeme sind der Grund für die weit verbreitete Akzeptanz von Schrittmotoren in jüngster Zeit. Schrittmotoren werden zur idealen Wahl für Automatisierungssysteme, die eine präzise Geschwindigkeitsregelung oder eine präzise Positionierung oder beides erfordern.
Wie wir wissen, werden viele industrielle Elektromotoren mit geschlossenem Regelkreis verwendet, um eine präzise Positionierung oder eine präzise Geschwindigkeitsregelung zu erreichen, andererseits kann ein Schrittmotor mit einem offenen Regelkreis arbeiten. Dies wiederum reduziert die Gesamtsystemkosten und vereinfacht die Maschinenkonstruktion im Vergleich zur Servo-Systemsteuerung. Lassen Sie uns kurz über den Schrittmotor und seine Typen sprechen.
- Verwandter Beitrag: Servomotor – Typen, Aufbau, Funktionsweise, & Anwendungen
Was ist ein Schrittmotor?
Der Schrittmotor ist ein bürstenloses elektromechanisches Gerät, das die an seinen Erregerwicklungen anliegende Folge von elektrischen Impulsen in eine genau definierte, schrittweise mechanische Wellendrehung umsetzt. Die Welle des Motors dreht sich bei jedem diskreten Impuls um einen festen Winkel. Diese Drehung kann linear oder winkelförmig sein.
Wenn eine Folge von Impulsen angelegt wird, wird sie um einen bestimmten Winkel gedreht. Der Winkel, um den sich die Schrittmotorwelle bei jedem Impuls dreht, wird als Schrittwinkel bezeichnet und in der Regel in Grad angegeben.

Die Anzahl der Eingangsimpulse, die an den Motor gegeben werden, entscheidet über den Schrittwinkel und somit wird die Position der Motorwelle durch die Steuerung der Anzahl der Impulse kontrolliert. Diese einzigartige Eigenschaft macht den Schrittmotor gut geeignet für ein Steuerungssystem, bei dem die genaue Position der Welle mit einer exakten Anzahl von Impulsen ohne Verwendung eines Rückkopplungssensors beibehalten wird.
Wenn der Schrittwinkel kleiner ist, wird die Anzahl der Schritte pro Umdrehung größer und die Genauigkeit der erzielten Position höher. Die Schrittwinkel können so groß wie 90 Grad und so klein wie 0,72 Grad sein, die gebräuchlichsten Schrittwinkel sind jedoch 1,8 Grad, 2,5 Grad, 7,5 Grad und 15 Grad.
Die Drehrichtung der Welle hängt von der Abfolge der am Stator anliegenden Impulse ab. Die Drehzahl der Welle oder die durchschnittliche Motordrehzahl ist direkt proportional zur Frequenz (der Rate der Eingangsimpulse) der an den Erregerwicklungen anliegenden Eingangsimpulse. Daher dreht sich der Schrittmotor bei niedriger Frequenz in Schritten und bei hoher Frequenz aufgrund der Trägheit kontinuierlich wie ein Gleichstrommotor.
Wie alle Elektromotoren hat er Stator und Rotor. Der Rotor ist der bewegliche Teil, der keine Wicklungen, Bürsten und einen Kommutator hat. Üblicherweise sind die Rotoren entweder von der Art der variablen Reluktanz oder der Permanentmagneten. Der Stator ist oft mit mehrpoligen und mehrphasigen Wicklungen aufgebaut, üblicherweise aus drei- oder vierphasigen Wicklungen, die für eine erforderliche Polzahl gewickelt sind, die durch die gewünschte Winkelverschiebung pro Eingangsimpuls bestimmt wird.
Im Gegensatz zu anderen Motoren arbeitet er mit programmierten diskreten Steuerimpulsen, die über einen elektronischen Antrieb an die Statorwicklungen angelegt werden. Die Drehung erfolgt durch die magnetische Wechselwirkung zwischen den Polen der sequentiell bestromten Statorwicklung und den Polen des Rotors.
Es gibt verschiedene Arten von Schrittmotoren, die heute auf dem Markt erhältlich sind, mit einem breiten Spektrum an Größen, Schrittzahlen, Konstruktionen, Verdrahtungen, Getrieben und anderen elektrischen Eigenschaften. Da diese Motoren in der Lage sind, diskret zu arbeiten, sind sie gut geeignet, um mit digitalen Steuergeräten wie Computern verbunden zu werden.
Durch die präzise Steuerung von Geschwindigkeit, Rotation, Richtung und Winkelposition sind sie von besonderem Interesse in industriellen Prozesssteuerungssystemen, CNC-Maschinen, Robotik, Fertigungsautomatisierungssystemen und Instrumentierung.
- Verwandte Beiträge: Bürstenloser Gleichstrommotor – Aufbau, Funktionsprinzip & Anwendungen
Typen von Schrittmotoren
Es gibt drei grundlegende Kategorien von Schrittmotoren, nämlich
- Permanentmagnet-Schrittmotor
- Variabler Reluktanz-Schrittmotor
- Hybrid-Schrittmotor
In all diesen Motoren werden Erregerwicklungen im Stator eingesetzt, wobei sich die Anzahl der Wicklungen auf die Anzahl der Phasen bezieht.
Eine Gleichspannung wird als Erregung an die Spulen der Wicklungen angelegt und jeder Wicklungsanschluss ist über einen Halbleiterschalter mit der Quelle verbunden. Je nach Typ des Schrittmotors ist der Rotor so aufgebaut wie ein weicher Stahlrotor mit ausgeprägten Polen, ein zylindrischer Permanentmagnetrotor und ein Permanentmagnet mit weichen Stahlzähnen. Lassen Sie uns diese Typen im Detail besprechen.

- Sie können auch lesen: Dreiphasiger Motoranschluss Stern/Dreieck (Y-Δ) Rückwärts / Vorwärts mit Zeitschaltuhr & Steuerdiagramm
Schrittmotor mit variabler Reluktanz
Es handelt sich um den Grundtyp des Schrittmotors, der schon seit langem existiert und dessen Funktionsprinzip vom Aufbau her am einfachsten zu verstehen ist. Wie der Name schon sagt, hängt die Winkellage des Rotors von der Reluktanz des magnetischen Kreises ab, der zwischen den Statorpolen (Zähnen) und den Rotorzähnen gebildet wird.

Aufbau des Schrittmotors mit variabler Reluktanz
Er besteht aus einem gewickelten Stator und einem Weicheisen-Mehrzahnrotor.Zahnrotor. Der Stator hat ein Blechpaket aus Siliziumstahl, auf das die Statorwicklungen gewickelt sind. In der Regel ist er für drei Phasen gewickelt, die auf die Polpaare verteilt sind.
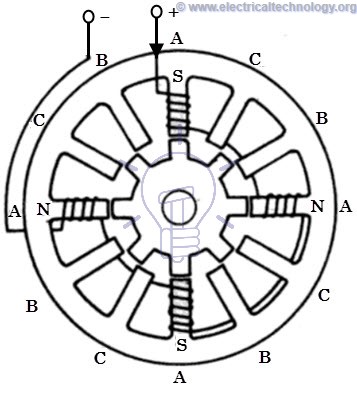
Die so gebildete Polzahl des Stators entspricht einem geraden Vielfachen der Anzahl der Phasen, für die Wicklungen auf den Stator gewickelt sind. In der folgenden Abbildung hat der Stator 12 gleichmäßig voneinander abstehende Pole, wobei jeder Pol mit einer Erregerspule bewickelt ist. Diese drei Phasen werden von einer Gleichstromquelle mit Hilfe von Halbleiterschaltern erregt.
Der Rotor trägt keine Wicklungen und ist vom ausgeprägten Poltyp, der vollständig aus geschlitzten Stahlblechen besteht. Die vorstehenden Zähne des Rotorpols haben die gleiche Breite wie die Zähne des Stators. Die Anzahl der Pole auf dem Stator unterscheidet sich von der der Rotorpole, was die Fähigkeit zum Selbststart und die bidirektionale Drehung des Motors ermöglicht.
Das Verhältnis der Rotorpole zu den Statorpolen für einen dreiphasigen Schrittmotor ist gegeben als: Nr = Ns ± (Ns / q). Hier ist Ns = 12, und q= 3, und somit Nr = 12 ± (12 / 3) = 16 oder 8. Nachfolgend ist ein 8-poliger Konstruktionsrotor ohne jegliche Erregung dargestellt.
Arbeitsweise eines Schrittmotor mit variabler Reluktanz
Der Schrittmotor arbeitet nach dem Prinzip, dass sich der Rotor in einer bestimmten Position mit den Zähnen des Erregerpols in einem Magnetkreis ausrichtet, in dem eine minimale Reluktanzstrecke vorhanden ist. Immer wenn der Motor mit Strom versorgt wird und eine bestimmte Wicklung erregt wird, erzeugt er sein eigenes Magnetfeld und entwickelt seine eigenen Magnetpole.
Durch den Restmagnetismus in den Magnetpolen des Rotors bewegt sich der Rotor in eine solche Position, dass eine minimale Reluktanzposition erreicht wird und somit ein Polsatz des Rotors mit dem erregten Polsatz des Stators fluchtet. In dieser Position stimmt die Achse des Statormagnetfeldes mit der Achse überein, die durch zwei beliebige Magnetpole des Rotors verläuft.
Wenn sich der Rotor mit den Statorpolen ausrichtet, hat er genügend magnetische Kraft, um die Welle an der Bewegung zur nächsten Position zu hindern, entweder im oder gegen den Uhrzeigersinn.
Betrachten Sie die schematische Darstellung einer 3-Phasen, 6 Statorpole und 4 Rotorzähne in der Abbildung unten. Wenn die Phase A-A‘ durch Schließen des Schalters -1 mit Gleichstrom versorgt wird, wird die Wicklung zum Magneten, wodurch ein Zahn Nord und der andere Süd wird. Die magnetische Achse des Stators liegt also entlang dieser Pole.
Aufgrund der Anziehungskraft zieht der Nordpol der Statorspule den nächsten Rotorzahn mit entgegengesetzter Polarität, d.h. Süd, und der Südpol den nächsten Rotorzahn mit entgegengesetzter Polarität, d.h. Nord, an. Der Rotor stellt sich dann auf seine minimale Reluktanzposition ein, in der die magnetische Achse des Rotors genau mit der magnetischen Achse des Stators übereinstimmt.
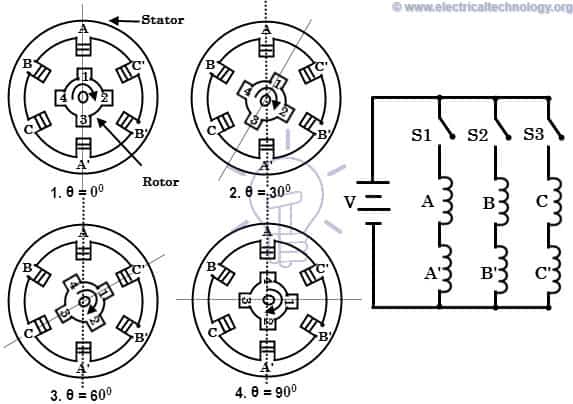
Wenn die Phase B-B‘ durch das Schließen des Schalters -2 erregt wird und die Phase A-A‘ durch das Öffnen des Schalters-1 stromlos bleibt, erzeugt die Wicklung B-B‘ den magnetischen Fluss und damit verschiebt sich die magnetische Achse des Stators entlang der von ihr gebildeten Pole. Dadurch verschiebt sich der Rotor zur geringsten Reluktanz mit magnetisierten Statorzähnen und dreht sich um einen Winkel von 30 Grad im Uhrzeigersinn.
Wenn nach dem Öffnen von Schalter-2 der Schalter-3 bestromt wird, wird die Phase C-C‘ bestromt, die Rotorzähne richten sich durch Bewegung um einen weiteren Winkel von 30 Grad in die neue Position aus. Auf diese Weise bewegt sich der Rotor im oder gegen den Uhrzeigersinn, indem die Statorwicklungen nacheinander in einer bestimmten Reihenfolge erregt werden. Der Schrittwinkel dieses 3-phasigen, 4-poligen Schrittmotors mit Rotorverzahnung wird ausgedrückt als 360/ (4 × 3) = 30 Grad (als Schrittwinkel = 360 / Nr × q).
Der Schrittwinkel kann weiter reduziert werden, indem die Anzahl der Pole auf dem Stator und dem Rotor erhöht wird, in diesem Fall werden Motoren oft mit zusätzlichen Phasenwicklungen gewickelt. Dies kann auch durch einen anderen Aufbau der Schrittmotoren erreicht werden, wie z.B. durch eine Multistack-Anordnung und ein Untersetzungsgetriebe.
- Sie können auch lesen: Dreiphasiger Motoranschluss STAR/DELTA ohne Zeitschaltuhr & Steuerdiagramme
Permanentmagnet-Schrittmotor
Der Motor in Permanentmagnetbauweise ist vielleicht der häufigste unter den verschiedenen Typen von Schrittmotoren. Wie der Name schon sagt, wird die Motorkonstruktion durch Permanentmagnete ergänzt. Diese Art von Schrittmotoren wird auch als Can-Stack-Motor oder Blechdosenmotor bezeichnet. Der Hauptvorteil dieses Motors sind die niedrigen Herstellungskosten. Diese Art von Motor hat 48-24 Schritte pro Umdrehung.

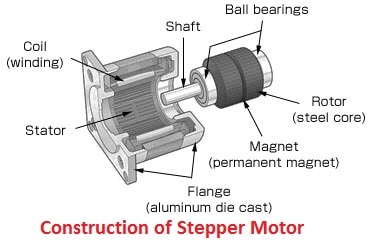
Konstruktion Permanentmagnet-Schrittmotor
Bei diesem Motor, ist der Stator mehrpolig und sein Aufbau ist ähnlich dem des oben beschriebenen Schrittmotors mit variabler Reluktanz. Er besteht aus einer geschlitzten Peripherie, auf der die Statorspulen gewickelt sind. Er hat projizierte Pole auf der geschlitzten Struktur, wo die gewickelten Wicklungen zwei-, drei- oder vierphasig sein können.
Die Endanschlüsse all dieser Wicklungen werden herausgekauft und über Halbleiterschalter im Antriebskreis an die Gleichstromerregung angeschlossen.
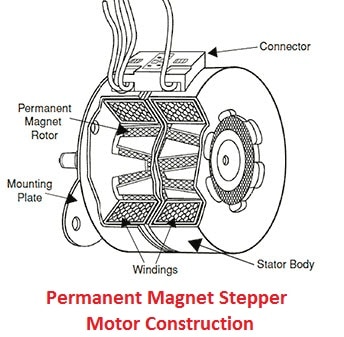
Der Rotor besteht aus einem permanentmagnetischen Material, wie z.B. einem Ferrit, das entweder zylindrisch oder ausgeprägt polig sein kann, aber normalerweise ist er vom glatten zylindrischen Typ. Der Rotor ist so konstruiert, dass er eine gerade Anzahl von permanentmagnetischen Polen mit abwechselnder Nord- und Südpolarität hat.
Arbeitsweise eines Permanentmagnet-Schrittmotors
Der Betrieb dieses Motors funktioniert nach dem Prinzip, dass sich ungleiche Pole anziehen und gleiche Pole abstoßen. Wenn die Statorwicklungen mit einer Gleichstromversorgung erregt werden, entsteht ein magnetischer Fluss, der die Nord- und Südpole festlegt. Aufgrund der Anziehungs- und Abstoßungskraft zwischen den permanentmagnetischen Rotorpolen und den Statorpolen beginnt der Rotor, sich in die Position zu bewegen, für die Impulse an den Stator gegeben werden.
Betrachten Sie einen 2-Phasen-Schrittmotor mit zwei permanentmagnetischen Rotorpolen, wie in der folgenden Abbildung dargestellt.
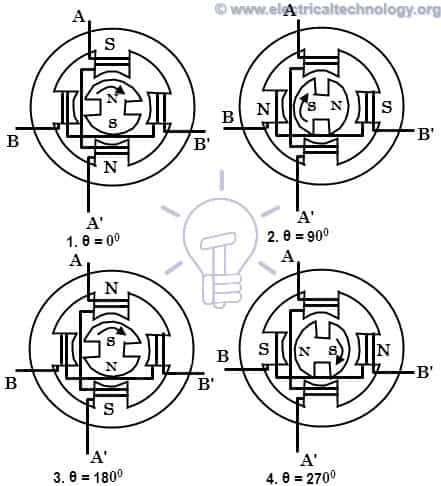
Wenn die Phase A mit einem Plus gegenüber A‘ bestromt wird, bilden die Wicklungen Nord- und Südpol. Durch die Anziehungskraft richten sich die Pole des Rotors mit den Polen des Stators aus, so dass sich die magnetische Polachse des Rotors mit der des Stators ausrichtet, wie in der Abbildung dargestellt.
Wird die Erregung auf die Phase B geschaltet und die Phase A abgeschaltet, richtet sich der Rotor weiter auf die magnetische Achse der Phase B aus und dreht sich somit um 90 Grad im Uhrzeigersinn.
Wird als nächstes die Phase A mit einem negativen Strom gegenüber A‘ erregt, so bewirkt die Bildung von Statorpolen, dass sich der Rotor um weitere 90 Grad im Uhrzeigersinn bewegt.
Auf die gleiche Weise dreht sich der Rotor um weitere 90 Grad in die gleiche Richtung, wenn die Phase B durch Schließen des Schalters der Phase A mit negativem Strom erregt wird. Wird anschließend die Phase A mit positivem Strom erregt, geht der Rotor in die ursprüngliche Position zurück und macht eine komplette 360-Grad-Drehung. Das bedeutet, dass der Rotor bei jeder Erregung des Stators dazu neigt, sich um 90 Grad im Uhrzeigersinn zu drehen.
Der Schrittwinkel dieses zweiphasigen 2-poligen Permanentmagnet-Rotormotors wird wie folgt ausgedrückt: 360/(2 × 2) = 90 Grad. Die Schrittweite kann durch gleichzeitiges Einschalten von zwei Phasen oder durch eine Abfolge von 1-Phasen-EIN- und 2-Phasen-EIN-Betrieb mit der richtigen Polarität verringert werden.
- Sie können auch lesen: Begriffe und Definitionen zu Motorsteuerung und -schutz
Hybrid-Schrittmotor
Es ist der beliebteste Schrittmotortyp, da er eine bessere Leistung als der Permanentmagnetrotor in Bezug auf Schrittauflösung, Haltemoment und Geschwindigkeit bietet. Allerdings sind diese Motoren teurer als PM-Schrittmotoren. Er kombiniert die besten Eigenschaften von Schrittmotoren mit variabler Reluktanz und Permanentmagneten. Diese Motoren werden in Anwendungen eingesetzt, die sehr kleine Schrittwinkel wie 1,5, 1,8 und 2,5 Grad erfordern.

Aufbau des Hybrid-Schrittmotors
Der Stator dieses Motors ist derselbe wie bei seinem Gegenstück mit Permanentmagnet oder Reluktanz. Die Statorspulen sind abwechselnd auf die Pole gewickelt. Dabei werden die Spulen verschiedener Phasen auf jeden Pol gewickelt, in der Regel zwei Spulen an einem Pol, was als bifilare Schaltung bezeichnet wird.
Der Rotor besteht aus einem Permanentmagneten, der in axialer Richtung magnetisiert wird, um ein Paar magnetischer Pole (N- und S-Pol) zu bilden. Jeder Pol ist mit gleichmäßig beabstandeten Zähnen belegt. Die Zähne bestehen aus weichem Stahl und sind an jedem Pol um eine halbe Zahnteilung versetzt.
- Related Post Warum werden Elektromotoren in kW statt in kVA angegeben?
Arbeitsweise eines Hybridschrittmotors
Dieser Motor arbeitet ähnlich wie ein Permanentmagnet-Schrittmotor. Die obige Abbildung zeigt einen 2-phasigen, 4-poligen, 6-Zahn-Rotor-Hybrid-Schrittmotor. Wenn die Phase A-A‘ mit einer Gleichstromversorgung erregt wird, während B-B‘ unerregt bleibt, richtet sich der Rotor so aus, dass der Südpol des Rotors dem Nordpol des Stators gegenübersteht, während der Nordpol des Rotors dem Südpol des Stators gegenübersteht.
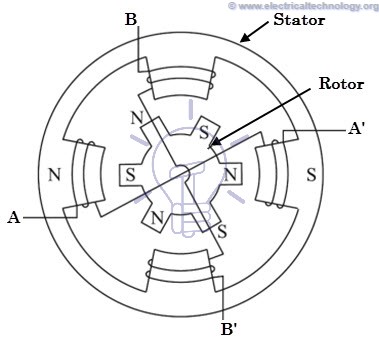
Wenn nun die Phase B-B‘ erregt ist, A-A‘ ausgeschaltet bleibt, so dass der obere Pol nach Norden und der untere nach Süden geht, dann richtet sich der Rotor durch Bewegung im Gegenuhrzeigersinn neu aus. Wird die Phase B-B‘ entgegengesetzt erregt, so dass der obere Pol nach Süden und der untere nach Norden wird, dann dreht sich der Rotor im Uhrzeigersinn.
Durch eine geeignete Impulsfolge am Stator dreht sich der Motor in die gewünschte Richtung. Bei jeder Erregung wird der Rotor in der neuen Position verriegelt, und selbst wenn die Erregung entfernt wird, behält der Motor seinen verriegelten Zustand aufgrund der Permanentmagnet-Erregung bei. Der Schrittwinkel dieses 2-phasigen, 4-poligen, 6-Zahn-Rotormotors wird mit 360/ (2 × 6) = 30 Grad angegeben. In der Praxis werden Hybridmotoren mit einer größeren Anzahl von Rotorpolen gebaut, um eine hohe Winkelauflösung zu erreichen.
- Verwandter Beitrag: Was ist der Motorwirkungsgrad & Wie kann man ihn verbessern?
Unipolare und bipolare Schrittmotoren
Die oben beschriebenen Motoren können unipolar oder bipolar sein, basierend auf der Anordnung der Spulenwicklung. Ein unipolarer Motor wird mit zwei Wicklungen pro Phase eingesetzt und somit ändert die Richtung des Stromflusses durch diese Wicklungen die Rotation des Motors. Bei dieser Konfiguration fließt der Strom in einer Spule in eine Richtung und in einer anderen Spule in die entgegengesetzte Richtung.
Die folgende Abbildung zeigt einen zweiphasigen unipolaren Schrittmotor, bei dem die Spulen A und C für eine Phase und B und D für die andere Phase stehen. In jeder Phase führt jede Spule Strom in entgegengesetzter Richtung zu der der anderen Spule. In jeder Phase führt immer nur eine Spule Strom, um eine bestimmte Drehrichtung zu erreichen. Durch das Umschalten der Klemmen an jeder Spule wird also die Drehrichtung gesteuert.
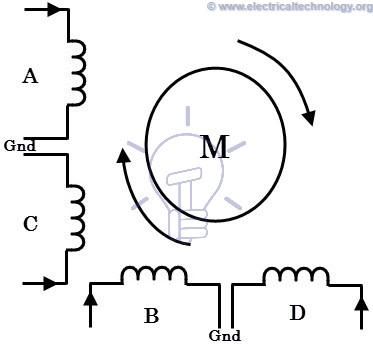
Bei einem bipolaren Schrittmotor besteht jede Phase aus einer einzigen Wicklung, statt aus zwei wie bei einem unipolaren. In diesem Fall wird die Drehrichtung durch Umkehrung des Stroms durch die Wicklungen gesteuert. Daher ist eine komplexe Treiberschaltung für die Stromumkehr erforderlich.

- Sie können auch lesen: Was ist eine Magnetspule und ein Magnetfeld
Schrittmodi eines Schrittmotors
Ein typischer Schrittbetrieb bewirkt, dass der Motor als Reaktion auf Stromimpulse eine Folge von Gleichgewichtslagen durchläuft. Es ist möglich, das Schrittverhalten auf verschiedene Arten zu variieren, indem man einfach die Reihenfolge ändert, in der die Statorwicklungen bestromt werden. Im Folgenden werden die häufigsten Betriebs- bzw. Antriebsarten von Schrittmotoren beschrieben.
- Wellenschritt
- Vollschritt
- Halbschritt
- Mikroschritt

Wellenschrittmodus
Der Wellenschrittmodus ist der einfachste aller Modi, bei dem immer nur eine Wicklung erregt wird. Jede Spule der Phase ist abwechselnd an die Versorgung angeschlossen. Die Tabelle unten zeigt die Reihenfolge, in der die Spulen in einem 4-Phasen-Schrittmotor erregt werden.
In diesem Modus gibt der Motor den maximalen Schrittwinkel im Vergleich zu allen anderen Modi. Es ist der einfachste und am häufigsten verwendete Modus für den Schrittbetrieb; das erzeugte Drehmoment ist jedoch geringer, da ein Teil der gesamten Wicklung zu einem bestimmten Zeitpunkt verwendet wird.
Vollschrittmodus
In diesem Antrieb oder Modus werden zwei Statorphasen gleichzeitig zu einem bestimmten Zeitpunkt erregt. Wenn zwei Phasen zusammen erregt werden, erfährt der Rotor das Drehmoment von beiden Phasen und kommt in die Gleichgewichtsposition, die zwischen zwei benachbarten Wellenschrittpositionen oder 1-phasigen Erregungen liegt. Daher bietet dieser Schritt ein besseres Haltemoment als der Wellenschritt. Die folgende Tabelle zeigt den Vollschritt-Antrieb für einen 4-Phasen-Schrittmotor.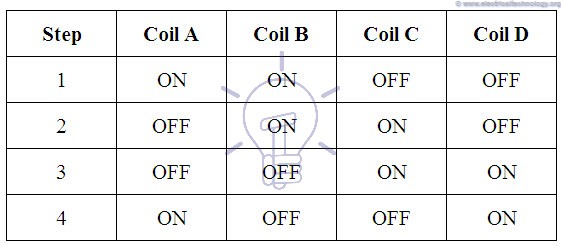
Halbschritt-Modus
Es ist die Kombination aus Wellen- und Vollschritt-Modus. Hierbei werden abwechselnd einphasige und zweiphasige Erregungen durchgeführt, d.h. einphasig EIN, zweiphasig EIN, usw. Der Schrittwinkel wird in diesem Modus halb so groß wie der Vollschrittwinkel. Dieser Antriebsmodus hat das höchste Drehmoment und die höchste Stabilität im Vergleich zu allen anderen Modi. Die Tabelle mit der Phasenpulsfolge für einen 4-Phasen-Motor im Halbschrittbetrieb ist unten angegeben.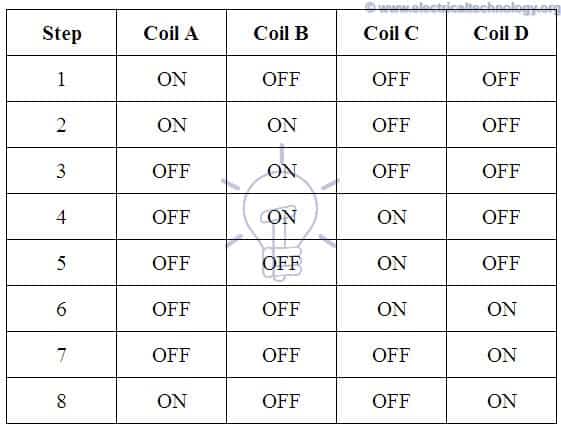
Mikroschrittbetrieb
In diesem Modus wird jeder Motorschritt in mehrere kleine Schritte, sogar Hunderte von festen Positionen, unterteilt, wodurch eine größere Positionierungsauflösung erreicht wird. Dabei werden die Ströme durch die Wicklungen kontinuierlich variiert, um sehr kleine Schritte zu erhalten. Dabei werden zwei Phasen gleichzeitig erregt, aber mit ungleichen Strömen in jeder Phase.
Zum Beispiel wird der Strom durch Phase -1 konstant gehalten, während der Strom durch Phase-2 schrittweise erhöht wird, bis der Maximalwert des Stroms erreicht ist, egal ob er negativ oder positiv ist. Der Strom in der Phase-1 wird dann schrittweise bis auf Null verringert oder erhöht. So erzeugt der Motor eine kleine Schrittgröße.
Alle diese Schrittmodi können mit jedem der oben beschriebenen Schrittmotortypen erreicht werden. Allerdings kann die Stromrichtung in jeder Wicklung während dieser Schritte variiert werden, je nach Motortyp und ob es sich um einen unipolaren oder bipolaren Motor handelt.
- Bei der Berechnung der Kabelgröße für LT & HT-Motoren
Vorteile des Schrittmotors
- Im Stillstand hat der Motor das volle Drehmoment. Egal, ob es kein Moment gibt oder ob sich die Position ändert.
- Es hat ein gutes Ansprechverhalten beim Starten, Stoppen und Umkehren der Position.
- Da es keine Kontaktbürsten im Schrittmotor gibt, ist er zuverlässig und die Lebenserwartung hängt von den Lagern des Motors ab.
- Der Motordrehwinkel ist direkt proportional zu den Eingangssignalen.
- Es ist einfach und weniger kostspielig zu steuern, da der Motor eine offene Regelschleife bietet, wenn er auf die digitalen Eingangssignale reagiert.
- Die Motordrehzahl ist direkt proportional zur Frequenz der Eingangsimpulse, auf diese Weise kann ein großer Drehzahlbereich erreicht werden.
- Wenn die Last an die Welle gekoppelt ist, ist es immer noch möglich, die synchrone Rotation mit niedriger Drehzahl zu realisieren.
- Die exakte Positionierung und Wiederholbarkeit der Bewegung ist gut, da sie eine Genauigkeit von 3-5% eines Schrittes hat, wobei der Fehler nicht kumulativ von einem Schritt zum anderen ist.
- Schrittmotoren sind sicherer und kostengünstiger (im Vergleich zu Servomotoren), sie haben ein hohes Drehmoment bei niedrigen Geschwindigkeiten, eine hohe Zuverlässigkeit und eine einfache Konstruktion, die in jeder Umgebung funktioniert.
Nachteile von Schrittmotoren
- Schrittmotoren haben einen geringen Wirkungsgrad.
- Sie haben eine geringe Genauigkeit.
- Ihr Drehmoment nimmt sehr schnell mit der Geschwindigkeit ab.
- Da der Schrittmotor im offenen Regelkreis arbeitet, gibt es keine Rückkopplung, um mögliche Fehlschritte anzuzeigen.
- Sie haben ein niedriges Verhältnis von Drehmoment zu Trägheit, was bedeutet, dass sie die Last nicht sehr schnell beschleunigen können.
- Sie sind laut.
Anwendungen von Schrittmotoren
- Schrittmotoren werden in automatisierten Produktionsanlagen und Messgeräten in der Automobilindustrie sowie in Industriemaschinen wie Verpackungs-, Etikettier-, Abfüll- und Schneidemaschinen usw. eingesetzt.
- Sie sind weit verbreitet in Sicherheitsgeräten wie &Überwachungskameras.
- In der medizinischen Industrie sind Schrittmotoren weit verbreitet in Proben, digitaler Dentalfotografie, Beatmungsgeräten, Flüssigkeitspumpen, Blutanalysemaschinen und medizinischen Scannern usw.
- In der Unterhaltungselektronik werden sie in Bildscannern, Fotokopier- und Druckmaschinen und in Digitalkameras für automatische Zoom- und Fokusfunktionen und -positionen eingesetzt.
- Schrittmotoren werden auch in Aufzügen, Förderbändern und Fahrspurumleitungen verwendet.
Sie können auch lesen:
- DC-Antriebe – Aufbau, Arbeitsweise & Klassifizierung elektrischer Gleichstromantriebe
- Dreiphasige Motorleistung & Steuerschaltpläne
- Elektromotoren-Bibliothek (AC & DC )