La question se pose assez souvent : » Quelle est la forme normale ou standard de l’algorithme PID (proportionnel-intégral-dérivé) ? «
La réponse est à la fois simple et complexe. Avant d’explorer la réponse, considérez les affichages d’écran présentés ci-dessous (cliquez pour obtenir une vue agrandie de l’exemple 1 ou de l’exemple 2) :
 |
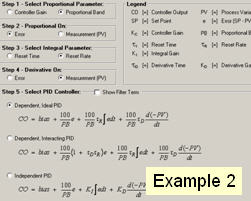 |
Comme le montrent les affichages à l’écran :
▪ Il existe trois formes populaires d’algorithmes PID (voir l’étape 5 dans les grandes vues d’images).
▪ Chacun des trois algorithmes a des paramètres de réglage et des variables d’algorithme qui peuvent être coulés de différentes manières (voir les étapes 1 – 4 dans les grandes vues d’image).
Donc votre fournisseur pourrait utiliser une des dizaines de formes d’algorithme possibles. Et si vous ajoutez un terme de filtre à votre contrôleur, le nombre de possibilités augmente considérablement.
La réponse simple
Tout algorithme peut fournir les mêmes performances que n’importe lequel des autres. Il n’y a aucun avantage de contrôle à choisir une forme plutôt qu’une autre. Ils sont tous standard ou normaux en ce sens.
Si vous envisagez un achat, sélectionnez le fournisseur qui répond le mieux à vos besoins et ne vous attardez pas sur les spécificités de l’algorithme. Voici quelques éléments à prendre en compte :
▪ la compatibilité avec les contrôleurs existants et le matériel et les logiciels associés
▪ le coût
▪ la facilité d’installation et de maintenance
▪ la fiabilité
▪ votre environnement d’exploitation (est-il propre ? frais ? sec ?)
Une réponse plus complète
La plupart des différentes formes d’algorithme de contrôleur peuvent être trouvées dans le produit d’un vendeur ou d’un autre. Certains fournisseurs utilisent même différentes formes au sein de leurs propres lignes de produits. Vous trouverez plus d’informations dans cet article.
Et bien que les différentes formes soient tout aussi capables les unes que les autres, chacune doit être réglée (les valeurs des paramètres réglables doivent être spécifiées) en utilisant des corrélations de réglage spécifiquement conçues pour cet algorithme de contrôle particulier.
Les logiciels commerciaux permettent d’obtenir facilement les performances souhaitées de l’un d’entre eux. Mais il est essentiel que vous connaissiez votre fournisseur et le numéro de modèle de votre contrôleur pour assurer une correspondance correcte entre la forme du contrôleur et les valeurs de réglage calculées.
L’alternative à une méthodologie de conception ordonnée est une approche de type » deviner et tester « . Bien qu’utilisé par certains praticiens, ce type de réglage par essais et erreurs gaspille un temps de production précieux, consomme plus de matières premières et d’utilités que nécessaire, génère des déchets supplémentaires et des produits hors normes, et peut même présenter des problèmes de sécurité.
Dans la plupart des articles sur Controlguru.com, nous utilisons une variation de la forme dépendante et idéale du contrôleur PID :

Où :
CO = signal de sortie du contrôleur
CObias = biais du contrôleur
e(t) = erreur actuelle du contrôleur, définie comme SP – PV
SP = point de consigne
PV = variable de processus mesurée
Kc = gain du contrôleur, un paramètre de réglage
Ti = temps de réinitialisation, un paramètre de réglage
Td = temps de dérivation, un paramètre de réglage
Pour renforcer le fait que les contrôleurs ont tous les mêmes capacités, nous utilisons occasionnellement des variantes de la forme dépendante, en interaction :

ou des variations de la forme PID indépendante :

Pensées finales
La discussion ci-dessus escamote certaines des différences subtiles dans la forme des algorithmes que nous pouvons exploiter pour améliorer les performances de contrôle. Nous apprendrons ces détails au fur et à mesure de notre apprentissage.
Par exemple, la dérivée sur l’erreur se comporte différemment de la dérivée sur la PV mesurée. Ceci est vrai pour tous les algorithmes. La dérivée sur l’erreur peut » kicker » après les étapes du point de consigne et cela est rarement considéré comme un comportement souhaitable. Ainsi, la dérivée sur PV est recommandée pour les applications industrielles.
Et si vous envisagez de programmer le contrôleur vous-même, ce n’est pas la forme de l’algorithme qui est le défi. Le grand obstacle est de comptabiliser correctement la logique d’enroulement et de gainage anti-réinitialisation pour permettre une transition sans à-coups entre les modes de fonctionnement.
La programmation de l’algorithme de la dérivation sur le PV n’est pas un défi.