Types de moteurs pas à pas – Leur construction, leur fonctionnement et leurs applications
Table des matières
L’invention de cartes pilotes dédiées aux moteurs pas à pas et d’autres technologies de contrôle numérique pour interfacer un moteur pas à pas avec des systèmes basés sur PC sont la raison de l’acceptation généralisée des moteurs pas à pas ces derniers temps. Les moteurs pas à pas deviennent le choix idéal pour les systèmes d’automatisation qui nécessitent un contrôle précis de la vitesse ou un positionnement précis ou les deux.
Comme nous savons que de nombreux moteurs électriques industriels sont utilisés avec un contrôle de rétroaction en boucle fermée pour obtenir un positionnement précis ou un contrôle précis de la vitesse, en revanche, un moteur pas à pas capable de fonctionner sur un contrôleur en boucle ouverte. Cela permet de réduire le coût total du système et de simplifier la conception de la machine par rapport à la commande du système servo. Discutons brièvement du moteur pas à pas et de ses types.
- Postage connexe : Servomoteur – Types, construction, fonctionnement, & Applications
Qu’est-ce qu’un moteur pas à pas ?
Le moteur pas à pas est un dispositif électromécanique sans balais qui convertit le train d’impulsions électriques appliquées à leurs enroulements d’excitation en une rotation mécanique de l’arbre par paliers définis avec précision. L’arbre du moteur tourne d’un angle fixe pour chaque impulsion discrète. Cette rotation peut être linéaire ou angulaire.Il obtient un mouvement d’un pas pour une entrée d’impulsion unique.
Lorsqu’un train d’impulsions est appliqué, il est tourné d’un certain angle. L’angle par lequel l’arbre du moteur pas à pas tourne pour chaque impulsion est appelé l’angle de pas, qui est généralement exprimé en degrés.

Le nombre d’impulsions d’entrée données au moteur décide de l’angle de pas et donc la position de l’arbre moteur est contrôlée en contrôlant le nombre d’impulsions. Cette caractéristique unique rend le moteur pas à pas bien adapté au système de contrôle en boucle ouverte dans lequel la position précise de l’arbre est maintenue avec un nombre exact d’impulsions sans utiliser de capteur de rétroaction.
Si l’angle de pas est plus petit, plus le nombre de pas par tour sera grand et plus la précision de la position obtenue sera élevée. Les angles de pas peuvent être aussi grands que 90 degrés et aussi petits que 0,72 degré, cependant, les angles de pas couramment utilisés sont 1,8 degré, 2,5 degrés, 7,5 degrés et 15 degrés.
Le sens de rotation de l’arbre dépend de la séquence d’impulsions appliquée au stator. La vitesse de l’arbre ou la vitesse moyenne du moteur est directement proportionnelle à la fréquence (le taux d’impulsions d’entrée) des impulsions d’entrée appliquées aux enroulements d’excitation. Par conséquent, si la fréquence est faible, le moteur pas à pas tourne par paliers et pour une fréquence élevée, il tourne continuellement comme un moteur à courant continu en raison de l’inertie.
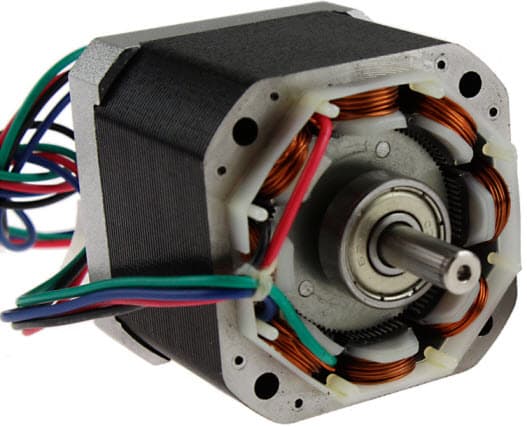
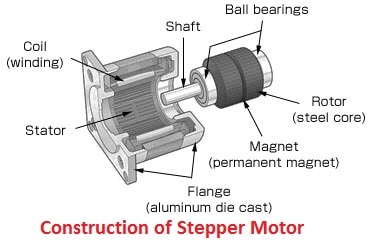
Comme tous les moteurs électriques, il possède un stator et un rotor. Le rotor est la partie mobile qui ne possède pas d’enroulements, de balais et de collecteur. Habituellement, les rotors sont de type à réluctance variable ou à aimant permanent. Le stator est souvent construit avec des enroulements multipolaires et multiphasés, généralement des enroulements à trois ou quatre phases enroulés pour un nombre requis de pôles décidé par le déplacement angulaire désiré par impulsion d’entrée.
Contrairement aux autres moteurs, il fonctionne sur une impulsion de commande discrète programmée qui est appliquée aux enroulements du stator par l’intermédiaire d’une commande électronique. La rotation se produit en raison de l’interaction magnétique entre les pôles de l’enroulement statorique alimenté séquentiellement et les pôles du rotor.
Il existe plusieurs types de moteurs pas à pas sont disponibles sur le marché actuel sur une large gamme de tailles, de nombre de pas, de constructions, de câblage, d’engrenage et d’autres caractéristiques électriques. Comme ces moteurs sont capables de fonctionner de manière discrète, ils sont bien adaptés pour s’interfacer avec des dispositifs de contrôle numérique comme les ordinateurs.
En raison du contrôle précis de la vitesse, de la rotation, de la direction et de la position angulaire, ils présentent un intérêt particulier pour les systèmes de contrôle des processus industriels, les machines CNC, la robotique, les systèmes d’automatisation de la fabrication et l’instrumentation.
- Poste connexe : Moteur à courant continu sans balais – Construction, principe de fonctionnement & Applications
Types de moteurs pas à pas
Il existe trois catégories de base de moteurs pas à pas, à savoir
- Moteur pas à pas à aimant permanent
- Moteur pas à pas à réluctance variable
- Moteur pas à pas hybride
Dans tous ces moteurs, des enroulements d’excitation sont employés dans le stator où le nombre d’enroulements se réfère au nombre de phases.
Une tension continue est appliquée comme excitation aux bobines des enroulements et chaque borne d’enroulement est connectée à la source par le biais d’un interrupteur à semi-conducteurs. Selon le type de moteur pas à pas, la conception de son rotor est construite comme un rotor en acier doux avec des pôles saillants, un rotor cylindrique à aimant permanent et un aimant permanent avec des dents en acier doux. Discutons de ces types en détail.

- Vous pouvez également lire : Connexion d’un moteur triphasé Étoile/Triangle (Y-Δ) Inversion / Avant avec alimentation par minuterie & Diagramme de commande
Moteur pas à pas à réluctance variable
C’est le type de base de moteur pas à pas qui existe depuis longtemps et il assure le moyen le plus facile de comprendre le principe de fonctionnement d’un point de vue structurel. Comme son nom l’indique, la position angulaire du rotor dépend de la réluctance du circuit magnétique formé entre les pôles (dents) du stator et les dents du rotor.

Construction du moteur pas à pas à réluctance variable
Il est constitué d’un stator bobiné et d’un rotor à multidents en fer doux. Le stator comporte un empilement de tôles d’acier au silicium sur lesquelles sont enroulés les enroulements statoriques. Habituellement, il est enroulé pour trois phases qui sont réparties entre les paires de pôles.
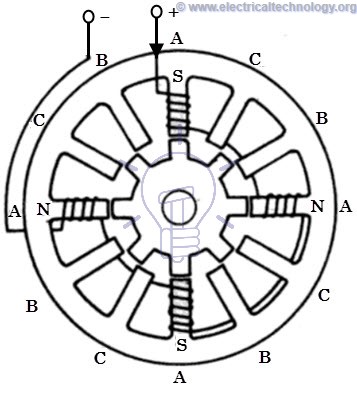
Le nombre de pôles sur le stator ainsi formé est égal à un multiple pair du nombre de phases pour lesquelles les enroulements sont enroulés sur le stator. Dans la figure ci-dessous, le stator a 12 pôles saillants également espacés où chaque pôle est enroulé avec une bobine d’excitation. Ces trois phases sont alimentées à partir d’une source de courant continu à l’aide d’interrupteurs à semi-conducteurs.
Le rotor ne porte pas d’enroulements et est de type à pôles saillants entièrement constitué de tôles d’acier fendues. Les dents projetées du pôle du rotor ont la même largeur que celle des dents du stator. Le nombre de pôles du stator diffère de celui des pôles du rotor, ce qui donne la capacité d’auto-démarrage et de rotation bidirectionnelle du moteur.
La relation des pôles du rotor en termes de pôles du stator pour un moteur pas à pas triphasé est donnée comme, Nr = Ns ± (Ns / q). Ici, Ns = 12, et q= 3, et donc Nr = 12 ± (12 / 3) = 16 ou 8. Un rotor de construction à 8 pôles sans aucune excitation est illustré ci-dessous.
Fonctionnement du Moteur pas à pas à réluctance variable
Le moteur pas à pas fonctionne sur le principe que le rotor s’aligne dans une position particulière avec les dents du pôle d’excitation dans un circuit magnétique où existe un chemin de réluctance minimum. Chaque fois que la puissance est appliquée au moteur et en excitant un enroulement particulier, il produit son champ magnétique et développe ses propres pôles magnétiques.
En raison du magnétisme résiduel dans les pôles magnétiques du rotor, il fera bouger le rotor dans une position telle qu’il atteindra la position de réluctance minimale et donc un ensemble de pôles du rotor s’aligne avec l’ensemble de pôles excités du stator. A cette position, l’axe du champ magnétique du stator correspond à l’axe passant par deux pôles magnétiques quelconques du rotor.
Lorsque le rotor s’aligne avec les pôles du stator, il a une force magnétique suffisante pour empêcher l’arbre de se déplacer vers la position suivante, dans le sens des aiguilles d’une montre ou dans le sens inverse.
Considérez le schéma d’une triphasée, 6 pôles de stator et 4 dents de rotor est montré dans la figure ci-dessous. Lorsque la phase A-A’ est alimentée en courant continu par la fermeture de l’interrupteur -1, l’enroulement devient un aimant ce qui a pour conséquence qu’une dent devient Nord et l’autre Sud. Ainsi, l’axe magnétique du stator se trouve le long de ces pôles.
En raison de la force d’attraction, la bobine du stator pôle Nord attire la dent du rotor la plus proche de polarité opposée, c’est-à-dire Sud et le pôle Sud attire la dent du rotor la plus proche de polarité opposée, c’est-à-dire Nord. Le rotor s’ajuste alors à sa position de réluctance minimale où l’axe magnétique du rotor correspond exactement à l’axe magnétique du stator.
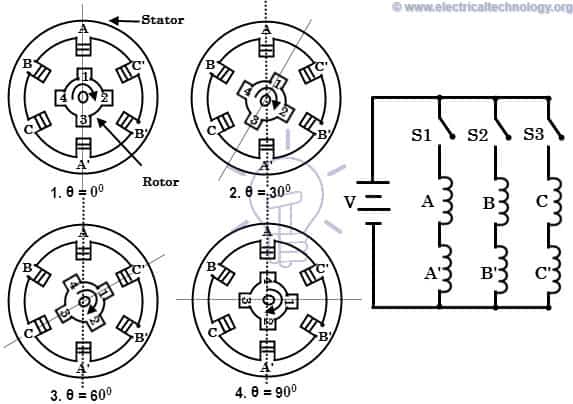
Lorsque la phase B-B’ est mise sous tension en fermant l’interrupteur -2 en maintenant la phase A-A’ hors tension en ouvrant l’interrupteur-1, l’enroulement B-B’ produit un flux magnétique et l’axe magnétique du stator se déplace le long des pôles ainsi formés. Par conséquent, le rotor se déplace vers la moindre réluctance avec les dents du stator magnétisées et tourne d’un angle de 30 degrés dans le sens des aiguilles d’une montre.
Lorsque l’interrupteur-3 est alimenté après l’ouverture de l’interrupteur-2, la phase C-C’ est alimentée, les dents du rotor s’alignent avec la nouvelle position en se déplaçant d’un angle supplémentaire de 30 degrés. De cette façon, le rotor se déplace dans le sens des aiguilles d’une montre ou dans le sens inverse en excitant successivement les enroulements du stator dans une séquence particulière. L’angle de pas de ce moteur pas à pas triphasé à rotor à 4 pôles est exprimé comme, 360/ (4 × 3) = 30 degrés (comme l’angle de pas = 360 / Nr × q).
L’angle de pas peut être encore réduit en augmentant le nombre de pôles sur le stator et le rotor, dans ce cas les moteurs sont souvent enroulés avec des enroulements de phase supplémentaires. Cela peut également être réalisé en adoptant une construction différente des moteurs pas à pas, comme un arrangement multi-pile et un mécanisme de réduction.
- Vous pouvez également lire : Connexion d’un moteur triphasé STAR/DELTA sans alimentation temporisée & Diagrammes de contrôle
Moteur pas à pas à aimant permanent
Le moteur de conception à aimant permanent est peut-être le plus commun parmi plusieurs types de moteurs pas à pas. Comme son nom l’indique, il ajoute des aimants permanents à la construction du moteur. Ce type de moteurs pas à pas est également appelé moteur can-stack ou moteur tin-can. Le principal avantage de ce moteur est son faible coût de fabrication. Ce type de moteur possède 48 à 24 pas par révolution.

Construction Moteur pas à pas à aimant permanent
Dans ce moteur, le stator est multipolaire et sa construction est similaire à celle du moteur pas à pas à réluctance variable comme discuté ci-dessus. Il est constitué d’une périphérie fendue sur laquelle sont enroulées les bobines du stator. Il possède des pôles projetés sur la structure fendue où les enroulements bobinés peuvent être bi ou tri ou quadriphasés.
Les bornes d’extrémité de tous ces enroulements sont achetées et connectées à l’excitation CC via des interrupteurs à semi-conducteurs dans le circuit d’entraînement.
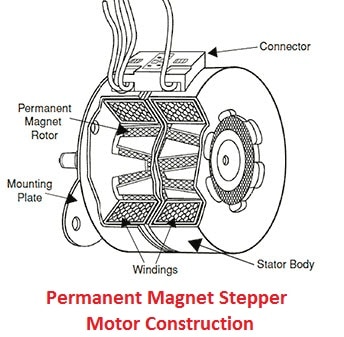
Le rotor est constitué d’un matériau d’aimant permanent comme une ferrite qui peut être en forme de pôle cylindrique ou saillant, mais généralement il est de type cylindrique lisse. Le rotor conçu pour avoir un nombre pair de pôles magnétiques permanents avec des polarités Nord et Sud alternées.
Fonctionnement du moteur pas à pas à aimant permanent
Le fonctionnement de ce moteur fonctionne sur le principe que les pôles différents s’attirent et les pôles semblables se repoussent. Lorsque les enroulements du stator sont excités par une alimentation en courant continu, ils produisent un flux magnétique et établissent les pôles Nord et Sud. En raison de la force d’attraction et de répulsion entre les pôles du rotor à aimant permanent et les pôles du stator, le rotor commence à se déplacer jusqu’à la position pour laquelle des impulsions sont données au stator.
Considérons un moteur pas à pas biphasé avec deux pôles de rotor à aimant permanent comme le montre la figure ci-dessous.
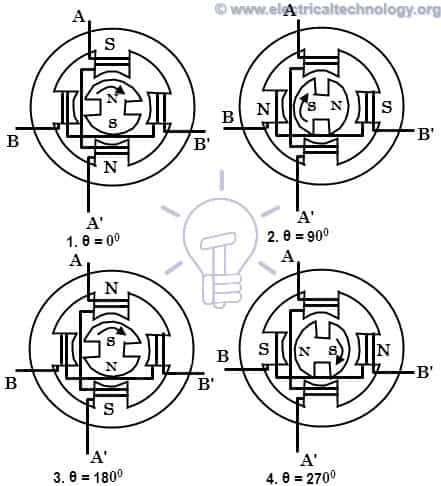
Lorsque la phase A est alimentée avec un positif par rapport à la A’, les enroulements établissent des pôles Nord et Sud. En raison de la force d’attraction, les pôles du rotor s’alignent avec les pôles du stator de telle sorte que l’axe des pôles magnétiques du rotor s’ajuste à celui du stator comme le montre la figure.
Lorsque l’excitation est commutée sur la phase B et que l’on éteint la phase A, le rotor s’ajuste en outre à l’axe magnétique de la phase B, et tourne ainsi de 90 degrés dans le sens des aiguilles d’une montre.
Puis, si la phase A est excitée avec un courant négatif par rapport à A’, la formation de pôles statoriques fait que le rotor se déplace de 90 degrés supplémentaires dans le sens des aiguilles d’une montre.
De la même manière, si la phase B est excitée avec un courant négatif en fermant l’interrupteur de la phase A, le rotor tourne de 90 degrés supplémentaires dans le même sens. Ensuite, si la phase A est excitée par un courant positif, le rotor revient à sa position initiale, effectuant ainsi une révolution complète de 360 degrés. Cela implique que, chaque fois que le stator est excité, le rotor a tendance à tourner de 90 degrés dans le sens des aiguilles d’une montre.
L’angle de pas de ce moteur à rotor à aimant permanent biphasé et bipolaire est exprimé comme, 360/ (2 × 2) = 90 degrés. La taille du pas peut être réduite en alimentant deux phases simultanément ou une séquence de modes de mise sous tension monophasés et biphasés avec une polarité appropriée.
- Vous pouvez également lire : Termes et définitions liés au contrôle et à la protection des moteurs
Moteur pas à pas hybride
C’est le type de moteur pas à pas le plus populaire car il offre de meilleures performances que le rotor à aimant permanent en termes de résolution de pas, de couple de maintien et de vitesse. Cependant, ces moteurs sont plus chers que les moteurs pas à pas PM. Il combine les meilleures caractéristiques des moteurs pas à pas à réluctance variable et à aimants permanents. Ces moteurs sont utilisés dans des applications qui nécessitent un très petit angle de pas tel que 1,5, 1,8 et 2,5 degrés.

Construction du moteur pas à pas hybride
Le stator de ce moteur est le même que son homologue à aimant permanent ou de type réluctance. Les bobines du stator sont enroulées sur des pôles alternés. Dans celui-ci, les bobines de différentes phases sont enroulées sur chaque pôle, généralement deux bobines à un pôle, ce qui est appelé connexion bifilaire.
Le rotor est constitué d’un aimant permanent qui est magnétisé dans la direction axiale pour créer une paire de pôles magnétiques (pôles N et S). Chaque pôle est recouvert de dents uniformément espacées. Les dents sont constituées d’acier doux et de deux sections, dont sur chaque pôle sont désalignées entre elles par un pas de demi-dent.
- Postage connexe Pourquoi les moteurs électriques sont évalués en kW au lieu de kVA ?
Fonctionnement du moteur pas à pas hybride
Ce moteur fonctionne de manière similaire à celui du moteur pas à pas à aimant permanent. La figure ci-dessus montre un moteur pas à pas biphasé, 4 pôles, rotor à 6 dents. Lorsque la phase A-A’ est excitée par une alimentation en courant continu, en gardant B-B’ non excitée, le rotor s’aligne de telle sorte que le pôle sud du rotor fait face au pôle nord du stator tandis que le pôle nord du rotor fait face au pôle sud du stator.
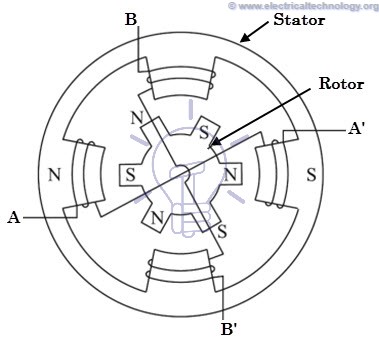
Maintenant, si la phase B-B’ est excitée, en maintenant A-A’ éteint de telle sorte que le pôle supérieur devienne nord et le pôle inférieur sud, le rotor s’alignera sur une nouvelle position en se déplaçant dans le sens inverse des aiguilles d’une montre. Si la phase B-B’ est excitée de manière opposée de telle sorte que le pôle supérieur devienne sud et l’inférieur devienne nord, alors le rotor tournera dans le sens des aiguilles d’une montre.
Par une séquence appropriée d’impulsions au stator, le moteur tournera dans la direction désirée. Pour chaque excitation, le rotor sera verrouillé dans une nouvelle position, et même si l’excitation est supprimée le moteur maintient toujours son état verrouillé en raison de l’excitation de l’aimant permanent. L’angle de pas de ce moteur à rotor biphasé, 4 pôles, 6 dents est donné comme 360/ (2 × 6) = 30 degrés. Dans la pratique, les moteurs hybrides sont construits avec un plus grand nombre de pôles de rotor afin d’obtenir une résolution angulaire élevée.
- Poste connexe : Qu’est-ce que le rendement d’un moteur & Comment l’améliorer ?
Moteurs pas à pas unipolaires et bipolaires
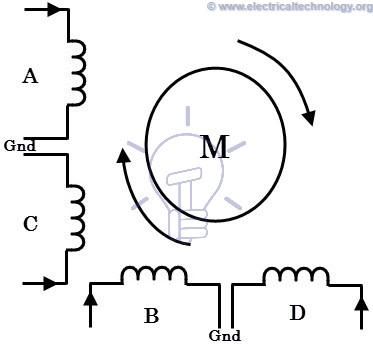
Les moteurs discutés ci-dessus peuvent être unipolaires ou bipolaires en fonction des dispositions d’enroulement des bobines. Un moteur unipolaire est employé avec deux enroulements par phase et donc la direction du flux de courant à travers ces enroulements change la rotation du moteur. Dans cette configuration, le flux de courant passe par une direction dans une bobine et la direction opposée dans une autre bobine.
La figure ci-dessous montre un moteur pas à pas unipolaire à 2 phases dans lequel les bobines A et C sont pour une phase et B et D sont pour l’autre phase. Dans chaque phase, chaque bobine transporte du courant dans la direction opposée à celle de l’autre bobine. Une seule bobine transporte du courant à la fois dans chaque phase pour obtenir un sens de rotation particulier. Ainsi, juste en commutant les bornes de chaque bobine, le sens de rotation est contrôlé.
Dans le cas d’un moteur pas à pas bipolaire, chaque phase est constituée d’un seul enroulement au lieu de deux dans le cas d’un unipolaire. Dans ce cas, le sens de rotation est contrôlé en inversant le courant dans les enroulements. Par conséquent, il nécessite un circuit d’entraînement complexe pour l’inversion du courant.

- Vous pouvez également lire : Qu’est-ce qu’un solénoïde et un champ magnétique de solénoïde
Modes pas à pas d’un moteur pas à pas
Une action pas à pas typique amène le moteur à parcourir une séquence de positions d’équilibre en réponse aux impulsions de courant qui lui sont données. Il est possible de faire varier l’action pas à pas de différentes manières simplement en changeant la séquence par laquelle les enroulements du stator sont alimentés. Voici les modes de fonctionnement ou d’entraînement les plus courants des moteurs pas à pas.
- Pas d’onde
- Pas complet
- Pas partiel
- Micropas
 .
.
Mode pas à pas à ondes
Le mode pas à pas à ondes est le plus simple de tous les autres modes dans lequel un seul enroulement est alimenté à un moment donné. Chaque bobine de la phase est connectée alternativement à l’alimentation. Le tableau ci-dessous montre l’ordre par lequel les bobines sont alimentées dans un moteur pas à pas à 4 phases.
Dans ce mode, le moteur donne un angle de pas maximal par rapport à tous les autres modes. C’est le mode le plus simple et le plus couramment utilisé pour le pas ; cependant le couple produit est moindre car il utilise une partie de l’enroulement total à un moment donné.
Mode pas à pas complet
Dans ce variateur ou mode, deux phases du stator sont excitées simultanément à un moment donné. Lorsque deux phases sont alimentées ensemble, le rotor subit le couple des deux phases et arrive à la position d’équilibre, qui sera intercalée entre deux positions de pas d’onde adjacentes ou excitations monophasées. Ce pas fournit donc un meilleur couple de maintien que le pas d’onde. Le tableau ci-dessous montre l’entraînement à pas complet pour un moteur pas à pas à 4 phases.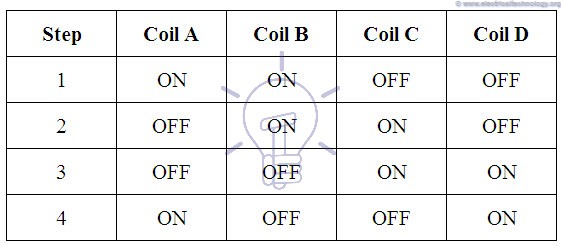
Mode demi-pas
C’est la combinaison des modes onde et pas complet. Dans celui-ci, les excitations monophasées et biphasées sont effectuées alternativement, c’est-à-dire une phase ON, deux phases ON, et ainsi de suite. L’angle de pas dans ce mode devient la moitié de l’angle de pas complet. Ce mode d’entraînement présente le couple et la stabilité les plus élevés par rapport à tous les autres modes. Le tableau contenant la séquence d’impulsions de phase pour un moteur à 4 phases en demi-pas est donné ci-dessous.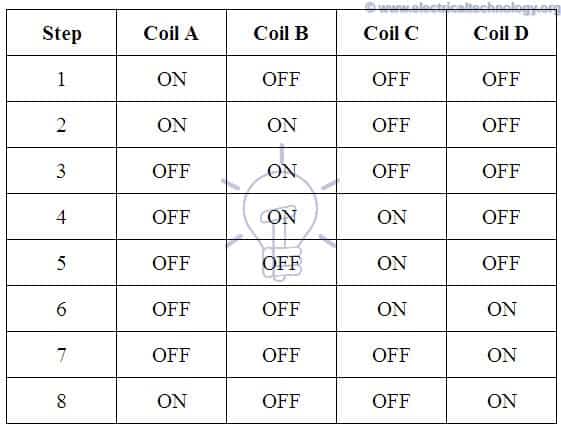
Mode micropas
Dans ce mode, chaque pas de moteur est subdivisé en plusieurs petits pas, voire en centaines de positions fixes, donc une plus grande résolution de positionnement est obtenue. Dans ce mode, les courants à travers les enroulements sont continuellement variés afin d’obtenir de très petits pas. Dans ce cas, deux phases sont excitées simultanément, mais avec les courants inégaux dans chaque phase.
Par exemple, le courant à travers la phase -1 est maintenu constant tandis que le courant à travers la phase-2 est incrémenté par étapes jusqu’à la valeur maximale du courant, qu’il soit négatif ou positif. Le courant dans la phase-1 est alors diminué ou augmenté par paliers jusqu’à zéro. Ainsi, le moteur produira une petite taille de pas.
Tous ces modes de pas peuvent être obtenus par chaque type de moteur pas à pas discuté ci-dessus. Cependant, la direction du courant dans chaque enroulement pendant ces étapes peut varier selon le type de moteur et s’il est unipolaire ou bipolaire.
- Related Post Cable Size Calculation for LT & HT Motors
Avantages du moteur pas à pas
- En position d’arrêt, le moteur a un couple complet. Peu importe s’il n’y a pas de moment ou de changement de position.
- Il a une bonne réponse au démarrage, à l’arrêt et à l’inversion de position.
- Comme il n’y a pas de balais de contact dans le moteur pas à pas, il est fiable et la durée de vie dépend des roulements du moteur.
- L’angle de rotation du moteur est directement proportionnel aux signaux d’entrée.
- Il est simple et moins coûteux à contrôler car le moteur fournit un contrôle en boucle ouverte lorsqu’il répond aux signaux d’entrée numériques.
- La vitesse du moteur est directement proportionnelle à la fréquence des impulsions d’entrée, de cette façon, une large gamme de vitesse de rotation peut être réalisée.
- Lorsque la charge est couplée à l’arbre, il est encore possible de réaliser la rotation synchrone avec une faible vitesse.
- Le positionnement exact et la répétabilité du mouvement sont bons car il a une précision de 3-5% d’un pas où l’erreur n’est pas cumulative d’un pas à l’autre.
- Les moteurs pas à pas sont plus sûrs et peu coûteux (par rapport aux servomoteurs), ayant un couple élevé à faible vitesse, une grande fiabilité avec une construction simple qui fonctionne dans n’importe quel environnement.
Inconvénients des moteurs pas à pas
- Les moteurs pas à pas ayant un faible rendement.
- Il a une faible précision.
- Son couple diminue très rapidement avec la vitesse.
- Comme le moteur pas à pas fonctionne en contrôle en boucle ouverte, il n’y a pas de rétroaction pour indiquer les étapes manquées potentielles.
- Il a un faible couple par rapport au rapport d’inertie, ce qui signifie qu’il ne peut pas accélérer la charge très rapidement.
- Ils sont bruyants.
Applications des moteurs pas à pas
- Les moteurs pas à pas sont utilisés dans les équipements de production automatisés et les jauges automobiles et les machines industrielles comme l’emballage, l’étiquetage, le remplissage et la découpe, etc.
- Il est largement utilisé dans les dispositifs de sécurité tels que les & caméras de surveillance.
- Dans l’industrie médicale, les moteurs pas à pas sont largement utilisés dans les échantillons, la photographie dentaire numérique, les respirateurs, les pompes à fluide, les machines d’analyse du sang et les scanners médicaux, etc.
- Ils sont utilisés dans l’électronique grand public dans les scanners d’images, les photocopieurs et les machines d’impression et dans les appareils photo numériques pour les fonctions et positions automatiques de zoom et de mise au point.
- Les moteurs pas à pas sont également utilisés dans les ascenseurs, les bandes transporteuses et les déviateurs de voies.
Vous pouvez également lire :
- Moteurs à courant continu – Construction, Fonctionnement & Classification des entraînements électriques à courant continu
- Puissance des moteurs triphasés & Schémas de câblage de commande
- Bibliothèque des moteurs électriques (AC & DC )
.