Tipi di motori passo-passo – la loro costruzione, il funzionamento e le applicazioni
Tabella del contenuto
L’invenzione di schede driver per motori passo-passo dedicate e altre tecnologie di controllo digitale per interfacciare un motore passo-passo a sistemi basati su PC sono la ragione della diffusa accettazione dei motori passo-passo in tempi recenti. I motori passo-passo sono diventati la scelta ideale per i sistemi di automazione che richiedono un controllo preciso della velocità o un posizionamento preciso o entrambi.
Come sappiamo che molti motori elettrici industriali sono utilizzati con un controllo di feedback ad anello chiuso per ottenere un posizionamento preciso o un controllo preciso della velocità, d’altra parte, un motore passo-passo in grado di funzionare su un controller ad anello aperto. Questo a sua volta riduce il costo totale del sistema e semplifica la progettazione della macchina rispetto al controllo del sistema servo. Parliamo brevemente del motore passo-passo e dei suoi tipi.
- Post correlati: Servomotore – Tipi, Costruzione, Funzionamento, & Applicazioni
Cos’è un motore passo-passo?
Il motore passo-passo è un dispositivo elettromeccanico senza spazzole che converte il treno di impulsi elettrici applicati ai suoi avvolgimenti di eccitazione in una rotazione meccanica dell’albero definita con precisione passo-passo. L’albero del motore ruota attraverso un angolo fisso per ogni impulso discreto. Questa rotazione può essere lineare o angolare e si ottiene un movimento a passo per un singolo impulso in entrata.
Quando viene applicato un treno di impulsi, esso viene fatto girare attraverso un certo angolo. L’angolo attraverso il quale l’albero del motore passo-passo gira per ogni impulso è indicato come angolo di passo, che è generalmente espresso in gradi.

Il numero di impulsi in ingresso dati al motore decide l’angolo di passo e quindi la posizione dell’albero motore è controllata controllando il numero di impulsi. Questa caratteristica unica rende il motore passo-passo ben adatto al sistema di controllo ad anello aperto in cui la posizione precisa dell’albero viene mantenuta con il numero esatto di impulsi senza l’uso di un sensore di feedback.
Se l’angolo di passo è più piccolo, maggiore sarà il numero di passi per giro e maggiore sarà la precisione della posizione ottenuta. Gli angoli di passo possono essere grandi come 90 gradi e piccoli come 0,72 gradi, tuttavia, gli angoli di passo comunemente usati sono 1,8 gradi, 2,5 gradi, 7,5 gradi e 15 gradi.
La direzione della rotazione dell’albero dipende dalla sequenza degli impulsi applicati allo statore. La velocità dell’albero o la velocità media del motore è direttamente proporzionale alla frequenza (la frequenza degli impulsi di ingresso) degli impulsi di ingresso applicati agli avvolgimenti di eccitazione. Quindi, se la frequenza è bassa, il motore passo-passo ruota a passi e per l’alta frequenza, ruota continuamente come un motore DC a causa dell’inerzia.
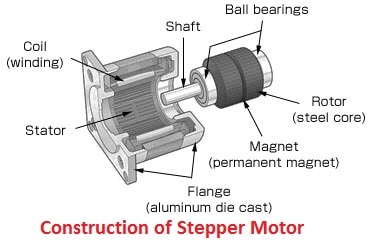
Come tutti i motori elettrici, ha statore e rotore. Il rotore è la parte mobile che non ha avvolgimenti, spazzole e un commutatore. Di solito i rotori sono del tipo a riluttanza variabile o a magnete permanente. Lo statore è spesso costruito con avvolgimenti multipolari e multifase, di solito di tre o quattro avvolgimenti di fase per un numero richiesto di poli deciso dallo spostamento angolare desiderato per impulso d’ingresso.
A differenza di altri motori funziona su un impulso di controllo discreto programmato che viene applicato agli avvolgimenti dello statore tramite un azionamento elettronico. La rotazione avviene grazie all’interazione magnetica tra i poli dell’avvolgimento statorico eccitati in sequenza e i poli del rotore.
Ci sono diversi tipi di motori passo-passo disponibili sul mercato odierno in una vasta gamma di dimensioni, numero di passi, costruzioni, cablaggio, ingranaggi e altre caratteristiche elettriche. Poiché questi motori sono in grado di operare in natura discreta, questi sono ben adatti a interfacciarsi con dispositivi di controllo digitali come i computer.
A causa del preciso controllo di velocità, rotazione, direzione e posizione angolare, questi sono di particolare interesse nei sistemi di controllo dei processi industriali, macchine CNC, robotica, sistemi di automazione della produzione e strumentazione.
- Post correlati: Motore DC Brushless – Costruzione, Principio di funzionamento & Applicazioni
Tipi di motori passo passo
Ci sono tre categorie di base di motori passo passo, cioè
- Motore passo-passo a magnete permanente
- Motore passo-passo a riluttanza variabile
- Motore passo-passo ibrido
In tutti questi motori sono impiegati avvolgimenti di eccitazione nello statore dove il numero di avvolgimenti si riferisce al numero di fasi.
Una tensione continua è applicata come eccitazione alle bobine degli avvolgimenti e ogni terminale dell’avvolgimento è collegato alla fonte attraverso un interruttore a stato solido. A seconda del tipo di motore passo-passo, il suo design del rotore è costruito come il rotore in acciaio morbido con poli salienti, il rotore cilindrico a magnete permanente e il magnete permanente con denti in acciaio morbido. Discutiamo questi tipi in dettaglio.

- Si può anche leggere: Collegamento del motore trifase a stella/triangolo (Y-Δ) inverso/avanti con potenza del timer & Diagramma di controllo
Motore passo-passo a riluttanza variabile
È il tipo base di motore passo-passo che esiste da molto tempo e garantisce il modo più semplice per capire il principio di funzionamento da un punto di vista strutturale. Come suggerisce il nome, la posizione angolare del rotore dipende dalla riluttanza del circuito magnetico formato tra i poli dello statore (denti) e i denti del rotore.

Costruzione del motore passo-passo a riluttanza variabile
È costituito da uno statore avvolto e un rotore a piùdente rotore. Lo statore ha una pila di lamine di acciaio al silicio su cui sono avvolti gli avvolgimenti dello statore. Di solito, è avvolto per tre fasi che sono distribuite tra le coppie di poli.
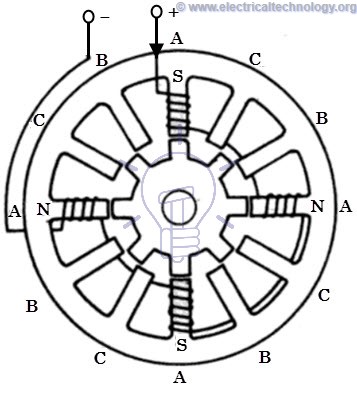
Il numero di poli sullo statore così formato è uguale a un multiplo pari del numero di fasi per cui gli avvolgimenti sono avvolti sullo statore. Nella figura qui sotto, lo statore ha 12 poli sporgenti equamente distanziati dove ogni polo è avvolto con una bobina eccitante. Queste tre fasi sono eccitate da una sorgente DC con l’aiuto di interruttori a stato solido.
Il rotore non porta avvolgimenti ed è del tipo a poli salienti fatto interamente di lamine d’acciaio scanalate. I denti proiettati del polo del rotore hanno la stessa larghezza di quelli dello statore. Il numero di poli sullo statore è diverso da quello dei poli del rotore, che fornisce la capacità di auto-avviamento e la rotazione bidirezionale del motore.
La relazione dei poli del rotore in termini di poli dello statore per un motore passo-passo trifase è data come, Nr = Ns ± (Ns / q). Qui Ns = 12, e q= 3, e quindi Nr = 12 ± (12 / 3) = 16 o 8. Un rotore di costruzione a 8 poli senza alcuna eccitazione è illustrato di seguito.
Lavoro di Motore passo-passo a riluttanza variabile
Il motore passo-passo funziona sul principio che il rotore si allinea in una particolare posizione con i denti del polo di eccitazione in un circuito magnetico in cui esiste un percorso di riluttanza minima. Ogni volta che viene applicata potenza al motore ed eccitando un particolare avvolgimento, esso produce il suo campo magnetico e sviluppa i propri poli magnetici.
A causa del magnetismo residuo nei poli del magnete del rotore, esso farà muovere il rotore in una posizione tale da raggiungere la posizione di minima riluttanza e quindi una serie di poli del rotore si allinea con la serie di poli eccitati dello statore. In questa posizione, l’asse del campo magnetico dello statore coincide con l’asse che passa per due poli magnetici qualsiasi del rotore.
Quando il rotore si allinea con i poli dello statore, ha abbastanza forza magnetica per trattenere l’albero dal muoversi verso la posizione successiva, sia in senso orario che antiorario.
Consideriamo lo schema di un trifase, 6 poli dello statore e 4 denti del rotore è mostrato nella figura seguente. Quando la fase A-A’ viene alimentata con un’alimentazione DC chiudendo l’interruttore -1, l’avvolgimento diventa un magnete che ha come risultato che un dente diventa Nord e l’altro Sud. Quindi l’asse magnetico dello statore si trova lungo questi poli.
A causa della forza di attrazione, il polo nord della bobina dello statore attrae il dente del rotore più vicino di polarità opposta, cioè il sud, e il polo sud attrae il dente del rotore più vicino di polarità opposta, cioè il nord. Il rotore si regola quindi nella sua posizione di minima riluttanza dove l’asse magnetico del rotore corrisponde esattamente all’asse magnetico dello statore.
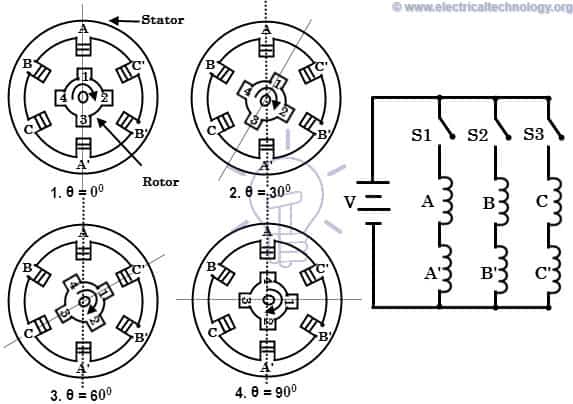
Quando la fase B-B’ viene eccitata chiudendo l’interruttore -2 mantenendo la fase A-A’ diseccitata aprendo l’interruttore-1, l’avvolgimento B-B’ produrrà il flusso magnetico e quindi l’asse magnetico dello statore si sposta lungo i poli così formati da esso. Quindi il rotore si sposta alla minima riluttanza con i denti dello statore magnetizzati e ruota attraverso un angolo di 30 gradi in senso orario.
Quando l’interruttore-3 è eccitato dopo l’apertura dell’interruttore-2, la fase C-C’ è eccitata, i denti del rotore si allineano con la nuova posizione spostandosi attraverso un ulteriore angolo di 30 gradi. In questo modo, il rotore si muove in senso orario o antiorario eccitando successivamente gli avvolgimenti dello statore in una particolare sequenza. L’angolo di passo di questo motore passo-passo trifase a 4 poli è espresso come 360/ (4 × 3) = 30 gradi (come angolo di passo = 360 / Nr × q).
L’angolo di passo può essere ulteriormente ridotto aumentando il numero di poli sullo statore e sul rotore, in tal caso i motori sono spesso avvolti con avvolgimenti di fase aggiuntivi. Questo può essere ottenuto anche adottando una diversa costruzione di motori passo-passo come la disposizione multistack e il meccanismo di riduzione.
- Si può anche leggere: Collegamento Motore Trifase STAR/DELTA Senza Timer Power & Diagrammi di Controllo
Motore Passo-Passo a Magnete Permanente
Il motore a magnete permanente è forse il più comune tra i vari tipi di motori passo-passo. Come il nome implica, aggiunge magneti permanenti alla costruzione del motore. Questo tipo di motori passo-passo è anche chiamato motore can-stack o motore tin-can. Il vantaggio principale di questo motore è il suo basso costo di fabbricazione. Questo tipo di motore ha 48-24 passi per rivoluzione.

Costruzione Motore passo a magnete permanente
In questo motore, lo statore è multipolare e la sua costruzione è simile a quella del motore passo-passo a riluttanza variabile come discusso sopra. Consiste in una periferia scanalata su cui sono avvolte le bobine dello statore. Ha poli proiettati sulla struttura scanalata dove gli avvolgimenti avvolti possono essere a due o tre o quattro fasi.
I terminali finali di tutti questi avvolgimenti sono acquistati e collegati all’eccitazione DC tramite interruttori a stato solido nel circuito di azionamento.
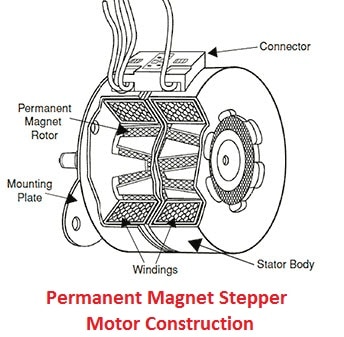
Il rotore è costituito da un materiale a magnete permanente come la ferrite che può avere forma cilindrica o a polo saliente, ma di solito è di tipo cilindrico liscio. Il rotore è progettato per avere un numero pari di poli magnetici permanenti con polarità nord e sud alternate.
Funzionamento del motore passo-passo a magnete permanente
Il funzionamento di questo motore funziona sul principio che i poli diversi si attraggono e i poli simili si respingono. Quando gli avvolgimenti dello statore sono eccitati con un’alimentazione DC, produce un flusso magnetico e stabilisce i poli Nord e Sud. A causa della forza di attrazione e repulsione tra i poli del rotore a magnete permanente e i poli dello statore, il rotore inizia a muoversi fino alla posizione per la quale vengono dati gli impulsi allo statore.
Consideriamo un motore passo-passo a 2 fasi con due poli del rotore a magnete permanente come mostrato nella figura sottostante.
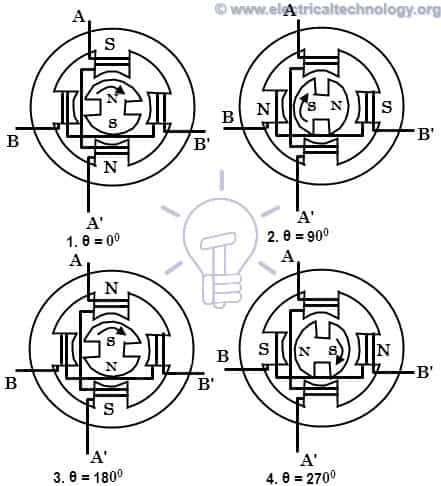
Quando la fase A è eccitata con un positivo rispetto alla A’, gli avvolgimenti stabiliscono i poli Nord e Sud. A causa della forza di attrazione, i poli del rotore si allineano con i poli dello statore in modo tale che l’asse dei poli magnetici del rotore si regola con quello dello statore come mostrato in figura.
Quando l’eccitazione viene commutata sulla fase B e si spegne la fase A, il rotore si regola ulteriormente sull’asse magnetico della fase B, e quindi ruota di 90 gradi in senso orario.
Poi, se la fase A viene eccitata con una corrente negativa rispetto ad A’, la formazione dei poli dello statore fa muovere il rotore di altri 90 gradi in senso orario.
Allo stesso modo, se la fase B viene eccitata con corrente negativa chiudendo l’interruttore della fase A, il rotore ruota di altri 90 gradi nella stessa direzione. Poi, se la fase A viene eccitata con corrente positiva, il rotore torna nella posizione originale facendo così una rivoluzione completa di 360 gradi. Questo implica che, ogni volta che lo statore è eccitato, il rotore tende a ruotare di 90 gradi in senso orario.
L’angolo di passo di questo motore a rotore a magnete permanente bifase a 2 poli è espresso come 360/ (2 × 2) = 90 gradi. La dimensione del passo può essere ridotta energizzando due fasi simultaneamente o una sequenza di modalità 1 fase ON e 2 fasi ON con una corretta polarità.
- Si può anche leggere: Termini e definizioni relativi al controllo e alla protezione dei motori
Motore passo-passo ibrido
È il tipo più popolare di motore passo-passo in quanto fornisce prestazioni migliori del rotore a magnete permanente in termini di risoluzione del passo, coppia di tenuta e velocità. Tuttavia, questi motori sono più costosi dei motori passo-passo PM. Combina le migliori caratteristiche di entrambi i motori passo-passo a riluttanza variabile e a magnete permanente. Questi motori sono utilizzati in applicazioni che richiedono un angolo di passo molto piccolo come 1,5, 1,8 e 2,5 gradi.

Costruzione del motore passo-passo ibrido
Lo statore di questo motore è uguale alla sua controparte a magnete permanente o a riluttanza. Le bobine dello statore sono avvolte su poli alternati. In questo, le bobine di fasi diverse sono avvolte su ogni polo, di solito due bobine su un polo che è indicato come una connessione bifilare.
Il rotore consiste in un magnete permanente che è magnetizzato in direzione assiale per creare una coppia di poli magnetici (poli N e S). Ogni polo è coperto da denti uniformemente distanziati. I denti sono fatti di acciaio morbido e di due sezioni, di cui su ogni polo sono disallineati l’un l’altro da un passo di mezzo dente.
- Related Post Why Electric Motors rated in kW instead of kVA?
Working of Hybrid Stepper Motor
Questo motore funziona in modo simile a quello del motore passo-passo a magnete permanente. La figura sopra mostra un motore passo-passo ibrido a 2 fasi, 4 poli, rotore a 6 denti. Quando la fase A-A’ è eccitata con un’alimentazione DC, mantenendo B-B’ non eccitata, il rotore si allinea in modo tale che il polo sud del rotore sia rivolto verso il polo nord dello statore mentre il polo nord del rotore è rivolto verso il polo sud dello statore.
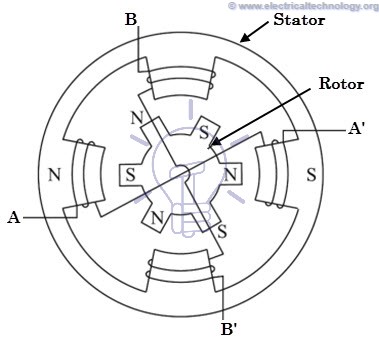
Ora, se la fase B-B’ è eccitata, mantenendo A-A’ spenta in modo tale che il polo superiore diventi il nord e quello inferiore il sud, allora il rotore si allineerà in una nuova posizione muovendosi in senso antiorario. Se la fase B-B’ è eccitata in modo opposto, così che il polo superiore diventa sud e quello inferiore diventa nord, allora il rotore girerà in senso orario.
Con una sequenza adeguata di impulsi allo statore, il motore girerà nella direzione desiderata. Per ogni eccitazione, il rotore viene bloccato nella nuova posizione, e anche se l’eccitazione viene rimossa, il motore mantiene la sua condizione bloccata grazie all’eccitazione del magnete permanente. L’angolo di passo di questo motore a 2 fasi, 4 poli, 6 denti del rotore è dato da 360/ (2 × 6) = 30 gradi. In pratica, i motori ibridi sono costruiti con un numero maggiore di poli del rotore per ottenere un’alta risoluzione angolare.
- Post correlati: Cos’è l’efficienza del motore & Come migliorarla?
Motori passo-passo unipolari e bipolari
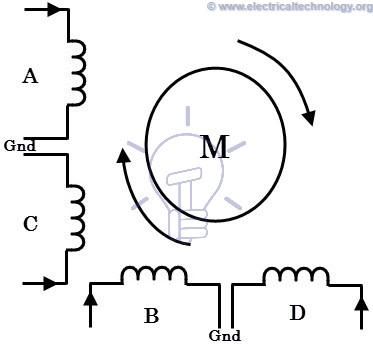
I motori sopra discussi possono essere unipolari o bipolari in base alla disposizione dell’avvolgimento della bobina. Un motore unipolare è impiegato con due avvolgimenti per fase e quindi la direzione del flusso di corrente attraverso questi avvolgimenti cambia la rotazione del motore. In questa configurazione, il flusso di corrente avviene in una direzione in una bobina e nella direzione opposta in un’altra bobina.
La figura sottostante mostra un motore passo-passo unipolare a 2 fasi in cui le bobine A e C sono per una fase e B e D sono per l’altra fase. In ogni fase ogni bobina trasporta la corrente in direzione opposta a quella dell’altra bobina. Solo una bobina porta corrente alla volta in ogni fase per ottenere un particolare senso di rotazione. Quindi, semplicemente commutando i terminali di ogni bobina, il senso di rotazione è controllato.
Nel caso di un motore passo-passo bipolare, ogni fase consiste in un solo avvolgimento piuttosto che due nel caso di unipolare. In questo, il senso di rotazione è controllato dall’inversione della corrente attraverso gli avvolgimenti. Quindi, richiede un complesso circuito di azionamento per l’inversione di corrente.

- Si può anche leggere: Cos’è un solenoide e il campo magnetico di un solenoide
Modalità di passo di un motore passo passo
Una tipica azione di passo fa sì che il motore passi attraverso una sequenza di posizioni di equilibrio in risposta agli impulsi di corrente che gli vengono dati. È possibile variare l’azione passo-passo in diversi modi semplicemente cambiando la sequenza attraverso la quale vengono eccitati gli avvolgimenti dello statore. Le modalità di funzionamento o di pilotaggio più comuni dei motori passo-passo sono le seguenti.
- Passo d’onda
- Passo intero
- Mezzo passo
- Microstepping

Modalità Wave Step
La modalità Wave Step è la più semplice di tutte le altre modalità in cui solo un avvolgimento è eccitato in qualsiasi momento. Ogni bobina della fase è collegata alternativamente all’alimentazione. La tabella sottostante mostra l’ordine attraverso il quale le bobine sono eccitate in un motore passo-passo a 4 fasi.
In questa modalità il motore dà il massimo angolo di passo rispetto a tutte le altre modalità. E’ la modalità più semplice e più comunemente usata per il passo; tuttavia la coppia prodotta è inferiore in quanto utilizza una parte dell’avvolgimento totale in un dato momento.
Modalità di passo completo
In questo azionamento o modalità, due fasi dello statore sono eccitate contemporaneamente in un dato momento. Quando due fasi sono eccitate insieme, il rotore sperimenterà la coppia di entrambe le fasi e arriva alla posizione di equilibrio, che sarà interlacciata tra due posizioni di passo d’onda adiacenti o eccitazioni monofase. Quindi questo passo fornisce una migliore coppia di mantenimento rispetto al passo d’onda. La tabella sottostante mostra l’azionamento a passo completo per il motore passo-passo a 4 fasi.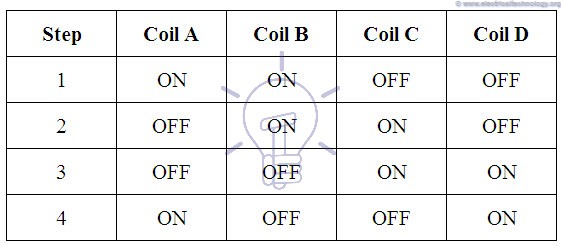
Modalità a mezzo passo
È la combinazione di entrambe le modalità onda e passo completo. In questa, le eccitazioni monofase e bifase sono effettuate alternativamente, cioè, una fase ON, due fasi ON, e così via. L’angolo di passo in questa modalità diventa la metà dell’angolo di passo pieno. Questa modalità di azionamento ha la coppia e la stabilità più elevate rispetto a tutte le altre modalità. La tabella contenente la sequenza degli impulsi di fase per un motore a 4 fasi in mezzo passo è data qui sotto.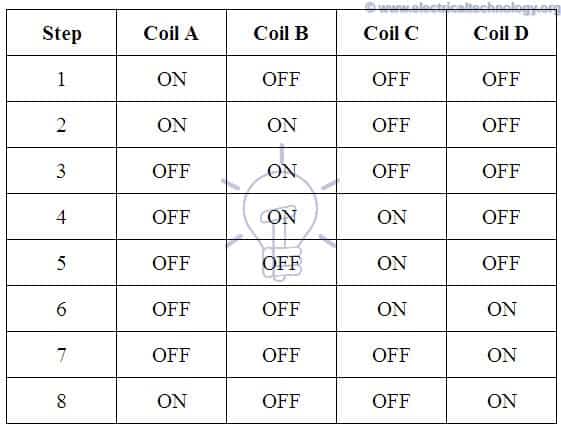
Modalità Microstepping
In questa modalità, ogni passo del motore è suddiviso in diversi piccoli passi, anche centinaia di posizioni fisse, quindi si ottiene una maggiore risoluzione di posizionamento. In questo, le correnti attraverso gli avvolgimenti sono continuamente variate per ottenere passi molto piccoli. In questo, due fasi sono eccitate simultaneamente, ma con le correnti disuguali in ogni fase.
Per esempio, la corrente attraverso la fase -1 è tenuta costante mentre la corrente attraverso la fase-2 è incrementata a passi fino al valore massimo della corrente, che sia negativo o positivo. La corrente nella fase-1 viene poi diminuita o aumentata a passi fino a zero. Così, il motore produrrà una piccola dimensione di passo.
Tutti questi modi di passo possono essere ottenuti da ogni tipo di motore passo-passo discusso sopra. Tuttavia, la direzione della corrente in ogni avvolgimento durante questi passi può essere variata a seconda del tipo di motore e se è unipolare o bipolare.
- Calcolo delle dimensioni del cavo per LT & Motori HT
Vantaggi del motore passo-passo
- In posizione di riposo, il motore ha piena coppia. Non importa se non c’è un momento o se cambia posizione.
- Ha una buona risposta all’avvio, all’arresto e all’inversione di posizione.
- Non essendoci spazzole di contatto nel motore passo-passo, è affidabile e la durata dipende dai cuscinetti del motore.
- L’angolo di rotazione del motore è direttamente proporzionale ai segnali di ingresso.
- È semplice e meno costoso da controllare in quanto il motore fornisce un controllo ad anello aperto quando risponde ai segnali di ingresso digitali.
- La velocità del motore è direttamente proporzionale alla frequenza degli impulsi di ingresso, in questo modo si può ottenere una vasta gamma di velocità di rotazione.
- Quando il carico è accoppiato all’albero, è ancora possibile realizzare la rotazione sincrona con bassa velocità.
- Il posizionamento esatto e la ripetibilità del movimento è buona in quanto ha una precisione del 3-5% di un passo dove l’errore non è cumulativo da un passo all’altro.
- I motori passo-passo sono più sicuri e a basso costo (rispetto ai servomotori), avendo una coppia elevata a basse velocità, alta affidabilità con una costruzione semplice che funziona in qualsiasi ambiente.
Svantaggi dei motori passo-passo
- I motori passo-passo hanno bassa efficienza.
- Ha bassa precisione.
- La sua coppia diminuisce molto rapidamente con la velocità.
- Poiché il motore passo-passo opera in controllo ad anello aperto, non c’è feedback per indicare potenziali passi mancati.
- Ha un basso rapporto coppia/inerzia significa che non può accelerare il carico molto rapidamente.
- Sono rumorosi.
Applicazioni dei motori passo-passo
- I motori passo-passo sono usati in attrezzature di produzione automatizzata e calibri automobilistici e macchine industriali come imballaggio, etichettatura, riempimento e taglio ecc.
- È ampiamente utilizzato nei dispositivi di sicurezza come le & telecamere di sorveglianza.
- Nell’industria medica, i motori passo-passo sono ampiamente utilizzati in campioni, fotografia dentale digitale, respiratori, pompe per fluidi, macchinari per l’analisi del sangue e scanner medici ecc.
- Sono usati nell’elettronica di consumo in scanner di immagini, fotocopiatrici e macchine da stampa e nella macchina fotografica digitale per funzioni e posizioni automatiche di zoom e messa a fuoco.
- I motori passo-passo sono anche usati in ascensori, nastri trasportatori e deviatori di corsia.
Si può anche leggere:
- Azionamenti CC – Costruzione, Funzionamento & Classificazione degli azionamenti elettrici DC
- Potenza motore trifase & Schemi elettrici di controllo
- Motori elettrici Biblioteca (AC & DC )