La domanda sorge abbastanza spesso: “Qual è la forma normale o standard dell’algoritmo PID (proporzionale-integrale-derivativo)?”
La risposta è semplice e complessa allo stesso tempo. Prima di esplorare la risposta, considerate le schermate mostrate qui sotto (cliccate per una visualizzazione ingrandita dell’esempio 1 o dell’esempio 2):
 |
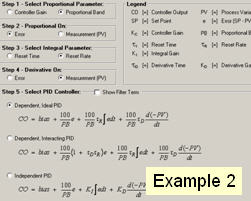 |
Come mostrato nella schermata di visualizzazione:
▪ Ci sono tre forme di algoritmi PID popolari (vedere il passo 5 nelle visualizzazioni delle immagini grandi).
▪ Ognuno dei tre algoritmi ha parametri di tuning e variabili di algoritmo che possono essere lanciati in modi diversi (vedi i passi 1 – 4 nelle visualizzazioni dell’immagine grande).
Quindi il tuo fornitore potrebbe usare una delle decine di possibili forme di algoritmo. E se aggiungi un termine di filtro al tuo controller, il numero di possibilità aumenta sostanzialmente.
La risposta semplice
Qualsiasi algoritmo può fornire le stesse prestazioni di qualsiasi altro. Non c’è alcun vantaggio di controllo nello scegliere una forma piuttosto che un’altra. Sono tutti standard o normali in questo senso.
Se stai considerando un acquisto, seleziona il fornitore che serve meglio alle tue esigenze e non soffermarti sulle specifiche dell’algoritmo. Alcune cose da considerare sono:
▪ la compatibilità con i controller esistenti e l’hardware e software associati
▪ il costo
▪ la facilità di installazione e manutenzione
▪ l’affidabilità
▪ il tuo ambiente operativo (è pulito? fresco? asciutto?)
Una risposta più completa
La maggior parte delle diverse forme di algoritmo del controller si possono trovare nel prodotto di un fornitore o in un altro. Alcuni venditori usano anche forme diverse all’interno delle loro linee di prodotti. Maggiori informazioni possono essere trovate in questo articolo.
E mentre le varie forme sono ugualmente capaci, ognuna deve essere sintonizzata (i valori dei parametri regolabili devono essere specificati) usando correlazioni di sintonizzazione specificamente progettate per quel particolare algoritmo di controllo.
Il software commerciale rende semplice ottenere le prestazioni desiderate da ognuno di essi. Ma è essenziale conoscere il fornitore e il numero di modello del controllore per assicurare una corrispondenza corretta tra la forma del controllore e i valori di regolazione calcolati.
L’alternativa a una metodologia di progettazione ordinata è un approccio “guess and test”. Sebbene sia usato da alcuni professionisti, tale messa a punto per tentativi ed errori spreca prezioso tempo di produzione, consuma più materie prime e servizi di quanto sia necessario, genera ulteriori rifiuti e prodotti fuori specifica, e può anche presentare problemi di sicurezza.
Nella maggior parte degli articoli su Controlguru.com, usiamo una qualche variazione della forma dipendente e ideale del controllore PID:

dove:
CO = segnale di uscita del controllore
CObias = bias del controllore
e(t) = errore attuale del controllore, definito come SP – PV
SP = set point
PV = variabile di processo misurata
Kc = guadagno del controllore, un parametro di regolazione
Ti = tempo di reset, un parametro di regolazione
Td = tempo di derivazione, un parametro di regolazione
Per rinforzare che i controllori sono tutti ugualmente capaci, usiamo occasionalmente variazioni della forma dipendente, interagente:

o variazioni della forma PID indipendente:

Pensieri finali
La discussione precedente sorvola su alcune delle sottili differenze nella forma degli algoritmi che possiamo sfruttare per migliorare le prestazioni del controllo. Impareremo a conoscere questi dettagli man mano che progrediamo nel nostro apprendimento.
Per esempio, la derivata sull’errore si comporta diversamente dalla derivata sul PV misurato. Questo è vero per tutti gli algoritmi. La derivata sull’errore può “scalciare” dopo i passi di set point e questo è raramente considerato un comportamento desiderabile. Quindi, la derivata su PV è raccomandata per le applicazioni industriali.
E se state pensando di programmare il controllore da soli, non è la forma dell’algoritmo che è la sfida. Il grande ostacolo è contabilizzare correttamente l’avvolgimento anti-reset e la logica di rivestimento per consentire la transizione senza urti tra le modalità operative.