ステッピングモーターの種類 – 構造・動作・用途
目次
専用のステッピングモータードライバーカードや、PCベースのシステムにステッピングモーターを接続するための他のデジタル制御技術が発明されたことが、最近ステッピングモーターが広く受け入れられている理由です。
産業用電動機の多くは、精密な位置決めや精密な速度制御を実現するために、クローズドループのフィードバック制御で使用されていますが、ステッピングモーターはオープンループのコントローラで動作することができます。 これにより、サーボシステム制御に比べて、システム全体のコストを削減し、機械設計を簡素化することができます。 
- 関連記事です。 サーボモーター – 種類、構造、動作、& 用途
ステッピングモーターとは?
ステッピングモーターは、励磁巻線に印加される電気パルス列を、正確に定義された段階的な機械的シャフトの回転に変換するブラシレス電気機械装置です。 モーターのシャフトは、各パルスごとに一定の角度で回転します。
パルス列が印加されると、ある一定の角度だけ回転しますが、この回転には直線的なものと角度的なものがあります。

モータに与える入力パルスの数によってステップ角が決まるため、パルス数を制御することでモータ軸の位置を制御します。
ステップ角が小さければ小さいほど、1回転あたりのステップ数が多くなり、得られる位置の精度が高くなります。
シャフトの回転方向は、ステーターに印加されるパルスの順序によって決まります。 軸の回転数やモーターの平均回転数は、励磁巻線に印加される入力パルスの周波数(入力パルスの割合)に正比例します。 したがって、周波数が低ければステッピングモーターは段階的に回転し、周波数が高ければ慣性によりDCモーターのように連続的に回転します。
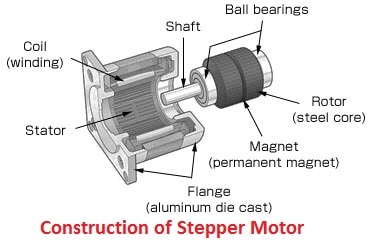
他の電気モーターと同様に、ステーターとローターがあります。
他の電動機と同様に、ステータとロータがあります。ロータは可動部で、巻線、ブラシ、整流器はありません。 通常、ローターには可変リラクタンス型と永久磁石型があります。
他のモーターとは異なり、電子駆動装置を介してステーターの巻線に印加されるプログラムされた個別の制御パルスで動作します。
他のモーターとは異なり、電子ドライブを介して固定子巻線に印加されるプログラムされた個別の制御パルスで動作します。
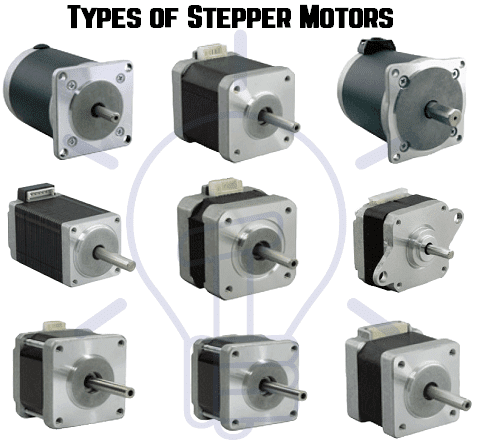
今日の市場では、サイズ、ステップ数、構造、配線、ギアリング、その他の電気的特性など、幅広い範囲で数種類のステッピングモーターが販売されています。
速度、回転、方向、および角度位置を正確に制御できるため、産業用プロセス制御システム、CNCマシン、ロボット、製造自動化システム、および計測器で特に注目されています。
- 関連記事 ブラシレスDCモーター – 構造、動作原理 & アプリケーション
ステッピングモーターの種類
ステッピングモーターには3つの基本的なカテゴリーがあります。
- 永久磁石型ステッピングモーター
- 可変リラクタンス型ステッピングモーター
- ハイブリッド型ステッピングモーター
これらすべてのモーターでは、ステーターに励磁巻線が採用されており、巻線の数は相の数を意味します。
直流電圧が巻線のコイルに励磁として印加され、各巻線の端子はソリッドステートスイッチを介してソースに接続されます。
ステッピングモーターは、その種類によって、突出した極を持つ軟鉄製ローター、円筒形の永久磁石ローター、軟鉄製の歯を持つ永久磁石など、ローターのデザインが異なります。
- ご参考までに。 & 制御図
可変リラクタンス型ステッピングモーター
昔からあるステッピングモーターの基本的なタイプで、構造的な観点から動作原理を理解するには最も簡単な方法です。 その名の通り、ステータの極(歯)とロータの歯の間に形成される磁気回路のリラクタンスによって、ロータの角度位置が変化します。

可変リラクタンス・ステッピングモーターの構造
巻かれたステーターと、軟鉄製の多歯のローターから構成されています。歯のローターで構成されています。 固定子はケイ素鋼の積層体で、その上に固定子巻線が巻かれています。
このようにして形成されたステータの極数は、ステータに巻線が巻かれた相の数の偶数倍になります。
このようにして形成されたステータの極数は、ステータに巻線が巻かれている相数の偶数倍になります。
ローターには巻線がなく、全体がスロット付きのスチールラミネートでできた突極型です。
ローターには巻線がなく、全体がスロット状のスチールラミネートでできた突極タイプです。ローターの突極の歯はステーターの歯と同じ幅です。
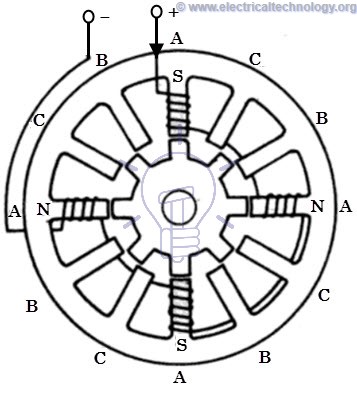
三相ステッピングモーターのステーターポールに対するローターポールの関係は、Nr = Ns ± (Ns / q)となります。 ここでは、Ns=12、q=3であるため、Nr=12±(12 / 3)=16または8となります。 励磁のない8極構造のローターを下図に示します。
の動作について
ステッピングモーターは、最小リラクタンス経路が存在する磁気回路内で、ローターが励磁極の歯と特定の位置に整列するという原理で動作します。
ローターの磁極に残留する磁気により、ローターは最小リラクタンス位置を達成するような位置に移動し、その結果、ローターの1組の磁極がステーターの通電された磁極と一致します。
ローターがステーターの磁極と整列すると、シャフトが次の位置に移動しないように、時計回りまたは反時計回りの方向に保持するのに十分な磁力があります。 スイッチ-1を閉じてA-A’相に直流電源を供給すると、巻線が磁石となり、1つの歯が北に、もう1つの歯が南になります。
引力により、ステータコイルの北極は反対極性の最も近いロータの歯、すなわち南極を引き寄せ、南極は反対極性の最も近いロータの歯、すなわち北極を引き寄せます。 その後、ローターは、ローターの磁気軸がステーターの磁気軸と正確に一致する、最小リラクタンス位置に調整されます。
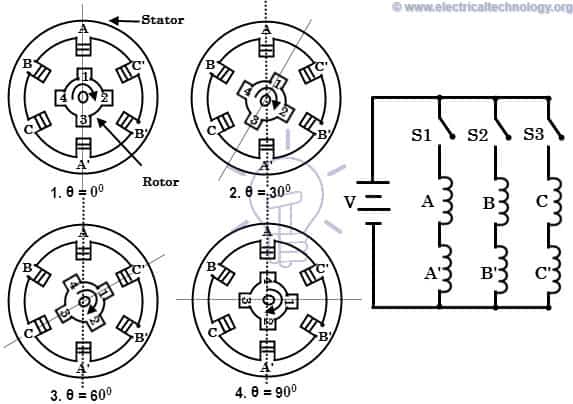
スイッチ-2を閉じてB-B’相を通電し、スイッチ-1を開いてA-A’相を非通電のままにすると、巻線B-B’は磁気を発生します。 巻線B-B’は磁束を発生させ、それによって形成された極に沿って固定子の磁気軸がシフトします。
スイッチ-2を開いた後、スイッチ-3を通電すると、C-C’相が通電され、ロータの歯はさらに30度の角度を移動して新しい位置に整列します。 このようにして、ステータの巻線を特定の順序で連続して励磁することにより、ロータは時計回りまたは反時計回りに移動します。
この3相4極ローターティーステーパーモーターのステップ角は、360/(4×3)=30度と表されます(ステップ角=360/Nr×qとして)。
このステップ角は、ステーターとローターの極数を増やすことでさらに小さくすることができますが、その場合、モーターには追加の相巻線が巻かれます。
- また、ステッピングモーターの構造を変えて、マルチスタック配列や減速ギア機構を採用することでも実現できます。
- You may be read by: Three Phase Motor Connection STAR/DELTA Without Timer Power & Control Diagrams
Permanent Magnet Stepper Motor
永久磁石設計のモーターは、いくつかのタイプのステッピングモーターの中で、おそらく最も一般的なものです。 その名の通り、モーターの構造に永久磁石を追加しています。 このタイプのステッピングモーターは、缶積みモーターやブリキ缶モーターとも呼ばれています。 このモーターの最大の利点は、製造コストが低いことである。 このタイプのモータは、1回転あたり48~24ステップです。

永久磁石ステッパーモーター 構造 永久磁石ステッパーモーター
このモーターでは、ステーターは多極のものを使用しています。 ステータは多極で、構造は前述の可変リラクタンス型ステッパモータと同様です。 ステータコイルが巻かれた外周部にスロットが設けられています。
これらすべての巻線の端部は、駆動回路のソリッドステートスイッチを介して直流励磁に接続されています。
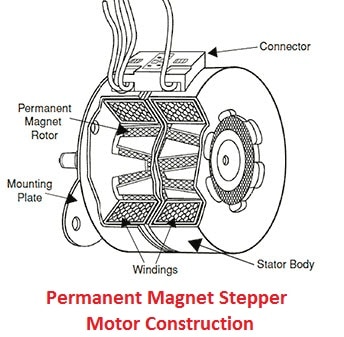
永久磁石式ステッピングモーターの構造 ローターはフェライトのような永久磁石材料でできており、その形状は円筒形でも突極形でもあります。 しかし、通常は滑らかな円筒形のものが使われます。
永久磁石ステッピングモーターの動作
このモーターの動作は、異極同士が引き合い、同極同士が反発するという原理に基づいています。 固定子の巻線を直流電源で励磁すると、磁束が発生して北極と南極が確定します。
下の図のように、2つの永久磁石ロータ極を持つ2相ステッピングモータを考えてみましょう。
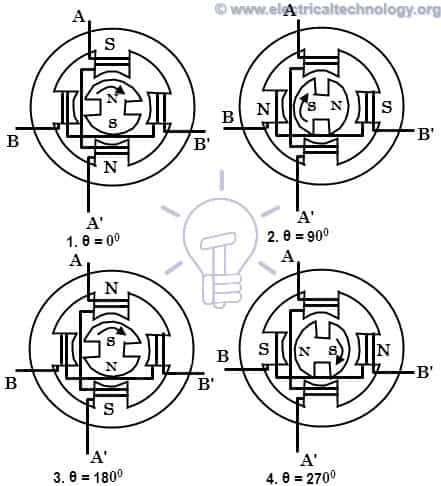
永久磁石式ステッピングモーターの動作を説明します。 A相がA’に対してプラスで通電されると、巻線には北極と南極ができます。
励磁をB相に切り替え、A相をオフにすると、ローターはさらにB相の磁極軸に合わせて、時計回りに90度回転します。
次に、A相をA’に対して負の電流で励磁すると、ステータの磁極の形成により、ロータは時計回りにさらに90度回転します。
同様に、A相スイッチを閉じてB相を負の電流で励磁すると、ロータは同じ方向にさらに90度回転します。 同様に、A相スイッチを閉じてB相を負電流で励磁すると、ローターは同じ方向に90度回転し、次にA相を正電流で励磁すると、ローターは元の位置に戻り、360度完全に回転します。
この2相2極永久磁石式ローターモーターのステップ角は、360/(2×2)=90度となります。
- You may also read:
- You may be read between the Motor Control and Protection
ハイブリッド・ステッピング・モーター
永久磁石式ローターよりもステップ分解能、保持トルク、速度の点で優れた性能を発揮するため、ステッピング・モーターの中で最も人気のあるタイプです。 しかし、PM型ステッピングモーターに比べて高価なモーターです。 可変リラクタンスモータと永久磁石式ステッピングモータの両方の優れた特徴を兼ね備えています。 これらのモーターは、1.5度、1.8度、2.5度といった非常に小さなステップ角を必要とするアプリケーションに使用されます。

ハイブリッド・ステッピング・モーター ハイブリッド・ステッピング・モーターの構造
このモーターのステーターは、永久磁石型やリラクタンス型のものと同じです。 ステータのコイルは交互の極に巻かれています。
回転子は永久磁石で構成されており、軸方向に磁化されて一対の磁極(N極、S極)を作ります。 それぞれの磁極には等間隔の歯がついています。
- Related Post Why Electric Motors rated in kW instead of kVA?
Working of Hybrid Stepper Motor
このモーターは永久磁石型ステッピングモーターと同様に動作します。 上の図は、2相4極6歯ローターのハイブリッド・ステッピング・モーターを示しています。 A-A’相を直流電源で励磁し、B-B’相を無励磁にすると、ロータの南極がステータの北極に、ロータの北極がステータの南極に向くようにロータが整列します。
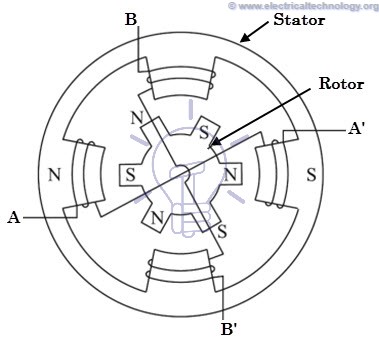
ハイブリッドステッピングモーターの動作 さて、B-B’相が励磁されている場合。 A-A’をオフにしたまま、上の極が北に、下の極が南になるようにすると、ローターは反時計回りに移動して新しい位置に整列します。
ステータへのパルスの適切なシーケンスにより、モータは所望の方向に回転します。
ステーターへの適切なパルスのシーケンスにより、モーターは希望の方向に回転します。励磁のたびにローターは新しい位置にロックされ、励磁を除去しても永久磁石の励磁によりロック状態を維持します。 この2相4極6歯のローターモーターのステップ角は、360/(2×6)=30度となる。 実際には、高い角度分解能を得るために、ロータの極数を増やしてハイブリッドモータを構成します。
- Related Post:
- 関連記事:モーターの効率とは & 効率を上げるには?
ユニポーラとバイポーラのステッピングモーター
上述のモーターは、コイル巻線の配置に基づいて、ユニポーラまたはバイポーラになります。 ユニポーラ モーターは、各相に 2 つの巻線が採用されており、したがって、これらの巻線を流れる電流の方向によってモーターの回転が変わります。
下図は2相ユニポーラステッピングモーターで、AとCのコイルが一方の相に、BとDのコイルが他方の相に使われています。
下図は2相単極性ステッピングモーターで、AとCのコイルは一方の相に、BとDは他方の相に使用されます。 特定の回転方向を実現するためには、各相で一度に1つのコイルだけが電流を流すことになります。 したがって、各コイルの端子を切り替えるだけで、回転方向を制御することができます。
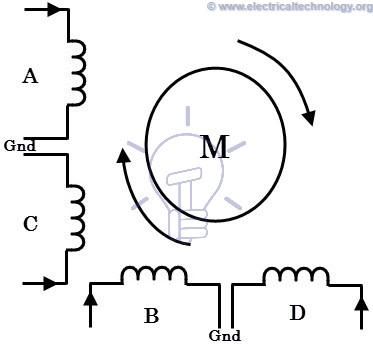
2相ユニポーラステッピングモーターの動作 バイポーラステッピングモーターの場合、各相はユニポーラの場合の2つの巻線ではなく、1つの巻線で構成されています。 この場合、巻線を流れる電流を逆にすることで回転方向を制御します。

2相バイポーラステッピングモーター - こちらもお読みください。
ソレノイドとは ソレノイドの磁界
典型的なステッピング動作では、モータに与えられた電流パルスに応じて、平衡位置のシーケンスを通過します。 ステータの巻線に通電する順序を変えるだけで、ステッピング動作をさまざまに変化させることができます。 ステッピングモーターの代表的な動作モード、駆動モードを以下に示します。
- ウェーブステップ
- フルステップ
- ハーフステップ
- マイクロステップ

ウェーブステップモード
ウェーブステップモードは、他のモードの中でも最もシンプルなもので、常に1つの巻線だけが通電しています。 相の各コイルは、交互に電源に接続されます。
このモードでは、モーターは他のすべてのモードに比べて最大のステップ角を得ることができます。

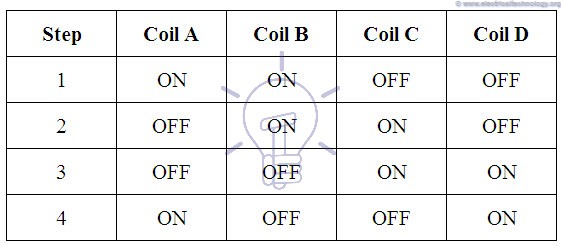
フルステップモード
このドライブまたはモードでは、2つの固定子の相が常に同時に通電されます。 2つの相が一緒に通電されると、ロータは両方の相からのトルクを経験し、平衡位置に来ますが、これは2つの隣接するウェーブステップ位置または1相励磁の間にインターリーブされます。 そのため、このステップは波動ステップよりも優れた保持トルクを提供します。
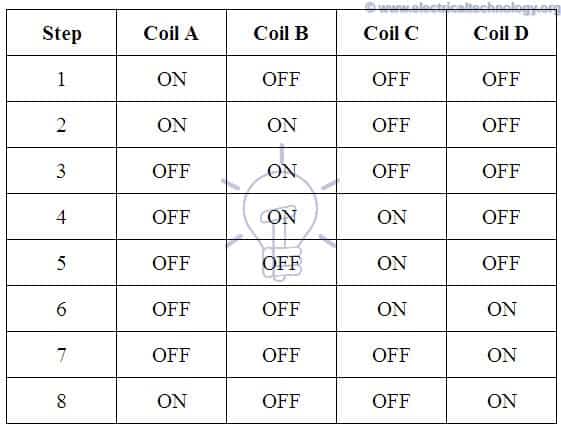
Half Step Mode
波動モードとフルステップモードの両方を組み合わせたものです。 このモードでは、単相と二相の励磁が交互に行われ、1相ON、2相ONなどとなります。 このモードでは、ステップ角がフルステップの半分になります。 このモードは、他のモードに比べて最も高いトルクと安定性を持っています。
Microstepping Mode
このモードでは、モータの各ステップを数百の固定位置まで細分化することで、より高い位置決め分解能を得ることができます。 このモードでは、非常に小さなステップを得るために、巻線を通る電流を連続的に変化させます。
例えば、-1相の電流を一定に保ちながら、-2相の電流を段階的に増加させていき、電流が最大値になると、それがマイナスであれプラスであれ、-1相の電流を増加させます。 その後、相-1に流れる電流はゼロになるまで段階的に減少または増加します。
これらすべてのステッピングモードは、前述のステッピングモーターの各タイプで得ることができます。
- Related Post Cable Size Calculation for LT & HT Motors
Advantages of Stepper Motor
- 停止位置では、モーターは完全なトルクを持っています。 瞬間がなくても、位置が変わっても大丈夫です。
- 起動、停止、反転の応答性が良い。
- ステッピングモーターには接触ブラシがないので、信頼性が高く、寿命はモーターのベアリングに依存する。
- モーターの回転角度は入力信号に直接比例する。
- モーターの回転角度は入力信号に正比例します。
- デジタル入力信号に応答してモーターがオープンループ制御を行うため、制御が簡単でコストがかかりません。
- 軸に負荷が連結されている場合でも、低速で同期回転を実現することができます。
- 1ステップの精度が3〜5%で、1ステップから別のステップへの誤差が累積しないため、正確な位置決めと動作の再現性が良好です。
- ステッピングモーターは、(サーボモーターと比較して)安全で低コストであり、低速で高いトルクを持ち、シンプルな構造で信頼性が高く、どのような環境でも動作します。
ステッピングモーターの欠点
- ステッピングモーターは効率が低い。
- ステッピングモーターはオープンループ制御で動作するため、ステップミスの可能性を示すフィードバックがありません。
- イナーシャ比に対するトルクが低いため、負荷を急速に加速することができません。
ステッピングモーターの用途
- ステッピングモーターは、自動化された生産設備や自動車のゲージ、包装、ラベル、充填、切断などの産業機械に使用されています。
- セキュリティ&監視カメラなどのセキュリティ機器にも広く使用されています。
- 医療業界では、ステッピングモーターは、サンプル、歯科用デジタル写真、呼吸器、流体ポンプ、血液分析機械、医療用スキャナーなどに広く使用されています。
- 家電製品では、イメージスキャナ、写真複写機、印刷機、デジタルカメラの自動ズームやフォーカス機能、ポジションなどに使用されています。
- ステッピングモーターは、エレベータ、ベルトコンベア、レーンダイバータなどにも使用されています。
あなたも読んでみてください。
- DCドライブ – 建設。 作業 & 電気DCドライブの分類
- 三相モーターの電力 & 制御配線図
- 電気モーターライブラリ(AC & DC)