Leerdoelen
- Beschrijf de beweging van gedempte harmonische beweging
- Schrijf de bewegingsvergelijkingen voor gedempte harmonische oscillaties
- Beschrijf de beweging van aangedreven, of gedwongen, gedempte harmonische beweging
- Schrijf de bewegingsvergelijkingen voor gedwongen, gedempte harmonische beweging
In de echte wereld volgen oscillaties zelden een echte SHM. Door een of andere wrijving wordt de beweging meestal gedempt, zodat ze wegsterft, of meer kracht nodig heeft om door te gaan. In dit hoofdstuk bekijken we enkele voorbeelden van gedempte harmonische beweging en zien we hoe we de bewegingsvergelijkingen kunnen aanpassen om dit meer algemene geval te beschrijven.
Een gitaarsnaar stopt met oscilleren een paar seconden nadat er op is getokkeld. Om te blijven schommelen op een schommel in een speeltuin, moet je blijven duwen (figuur). Hoewel we wrijving en andere niet-conservatieve krachten vaak klein of verwaarloosbaar kunnen maken, is een volledig ongedempte beweging zeldzaam. Het is zelfs mogelijk dat we oscillaties willen dempen, zoals met schokdempers voor auto’s.

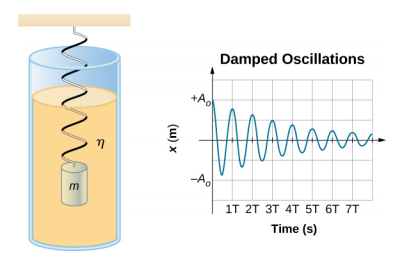
Figuur (\PageIndex{2}) toont een massa m bevestigd aan een veer met een krachtconstante k. De massa wordt opgetild tot een positie A0, de beginamplitude, en dan losgelaten. De massa oscilleert rond de evenwichtspositie in een vloeistof met viscositeit, maar de amplitude neemt bij elke oscillatie af. Voor een systeem met een kleine hoeveelheid demping zijn de periode en de frequentie constant en bijna gelijk aan die van de SHM, maar de amplitude neemt geleidelijk af zoals getoond. Dit gebeurt omdat de niet-conservatieve dempingskracht energie aan het systeem onttrekt, meestal in de vorm van thermische energie.
Bekijk de krachten die op de massa werken. Merk op dat de enige bijdrage van het gewicht bestaat uit het veranderen van de evenwichtspositie, zoals eerder in het hoofdstuk is besproken. Daarom is de nettokracht gelijk aan de kracht van de veer en de dempingskracht (F_D). Als de grootte van de snelheid klein is, wat betekent dat de massa langzaam schommelt, is de dempingskracht evenredig met de snelheid en werkt tegen de bewegingsrichting in (\(F_D = -b)). De netto kracht op de massa is dus
Wanneer we dit als een differentiaalvergelijking in x schrijven, krijgen we
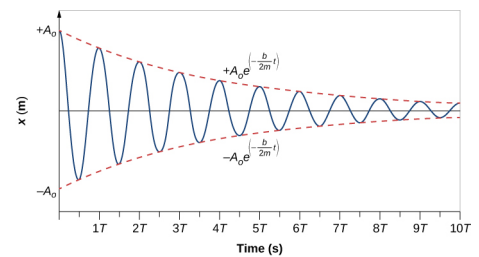
Om de oplossing van deze vergelijking te bepalen, beschouwen we de grafiek van de positie versus de tijd in figuur \(\PageIndex{3}\). De kromme lijkt op een cosinuskromme die schommelt in de omhullende van een exponentiële functie \(A_0e^{-alfa t}) waarbij \(\alpha = \frac{b}{2m}\). De oplossing is
Het blijft een oefening om te bewijzen dat dit inderdaad de oplossing is. Om te bewijzen dat het de juiste oplossing is, neem je de eerste en tweede afgeleide met betrekking tot de tijd en substitueer je die in vergelijking 15.23. Men vindt dat vergelijking 15.24 de oplossing is als
Bedenk dat de hoekfrequentie van een massa die SHM ondergaat gelijk is aan de vierkantswortel van de krachtconstante gedeeld door de massa. Dit wordt vaak de natuurlijke hoekfrequentie genoemd, die wordt weergegeven als
De hoekfrequentie voor gedempte harmonische beweging wordt
Herinner u dat toen we deze beschrijving van gedempte harmonische beweging begonnen, we stelden dat de demping klein moest zijn. Twee vragen komen in me op. Waarom moet de demping klein zijn? En hoe klein is klein? Als je geleidelijk de hoeveelheid demping in een systeem verhoogt, beginnen de periode en de frequentie te worden beïnvloed, omdat demping de heen-en-weergaande beweging tegenwerkt en dus vertraagt. (De netto kracht is in beide richtingen kleiner.) Als de demping erg groot is, oscilleert het systeem niet eens, maar gaat het langzaam naar een evenwicht toe. De hoekfrequentie is gelijk aan
Als b groter wordt, wordt \(\frac{k}{m} – \links(\frac{b}{2m}}rechts)^{2}) kleiner en bereikt uiteindelijk nul als b = \(\sqrt{4mk}}). Als b groter wordt, wordt \(\frac{k}{m} – \links(\dfrac{b}{2m}}rechts)^{2}} een negatief getal en \(\sqrt{\frac{k}{m} – \links(\frac{b}{2m}}rechts)^{2}} een complex getal.
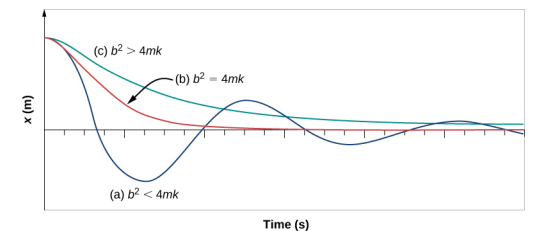
Figuur \(\PageIndex{4}}) toont de verplaatsing van een harmonische oscillator voor verschillende hoeveelheden demping.
- Wanneer de dempingsconstante klein is, b < (\sqrt{4mk}), oscilleert het systeem terwijl de amplitude van de beweging exponentieel afneemt. Men zegt dat dit systeem ondergedempt is, zoals in kromme (a). Veel systemen zijn ondergedempt, en oscilleren terwijl de amplitude exponentieel afneemt, zoals de massa die op een veer oscilleert. De demping kan vrij klein zijn, maar uiteindelijk komt de massa tot rust.
- Als de dempingsconstante \(b = \sqrt{4mk}) is, zegt men dat het systeem kritisch gedempt is, zoals in kromme (\(b)). Een voorbeeld van een kritisch gedempt systeem zijn de schokbrekers in een auto. Het is gunstig als de trillingen zo snel mogelijk afnemen. Hier oscilleert het systeem niet, maar nadert het asymptotisch zo snel mogelijk de evenwichtstoestand.
- Curve (c) in figuur b(\PageIndex{4}\) stelt een overgedempt systeem voor waarbij b > \sqrt{4mk}\). Een overgedempt systeem zal over een langere periode het evenwicht benaderen.
Kritische demping is vaak gewenst, omdat zo’n systeem snel terugkeert naar het evenwicht en ook in evenwicht blijft. Bovendien beweegt een constante kracht uitgeoefend op een kritisch gedempt systeem het systeem in de kortst mogelijke tijd naar een nieuwe evenwichtsstand zonder door te schieten of te oscilleren over de nieuwe stand.
(PaginaIndex{1})
Waarom zijn volledig ongedempte harmonische oscillatoren zo zeldzaam?
Bijdragers en toeschrijvingen
-
Samuel J. Ling (Truman State University), Jeff Sanny (Loyola Marymount University), en Bill Moebs met vele auteurs die een bijdrage hebben geleverd. Dit werk is gelicenseerd door OpenStax University Physics onder een Creative Commons Naamsvermelding Licentie (by 4.0).