Gedempte harmonische beweging
Op den duur zal de beweging van de gedempte harmonische oscillator tot stilstand komen.
Leerdoelen
Beschrijf de tijdsevolutie van de beweging van de gedempte harmonische oscillator
Key Takeaways
Key Points
- Om een gedempte harmonische oscillator te beschrijven, voeg je een snelheidsafhankelijke term toe, bx, waarbij b de vicieuze dempingscoëfficiënt is.
- Oplos de differentiaalvergelijking voor de bewegingsvergelijking, x(t).
- Afhankelijk van de waarden van de dempingscoëfficiënt en de ongedempte hoekfrequentie, zal het resultaat een van de drie gevallen zijn: een ondergedempt systeem, een overgedempt systeem, of een kritisch gedempt systeem.
Key Terms
- Onderdempt: “De toestand waarin demping van een oscillator ervoor zorgt dat deze terugkeert naar evenwicht waarbij de amplitude geleidelijk afneemt tot nul; systeem keert sneller terug naar evenwicht maar schiet door en kruist de evenwichtspositie één of meerdere keren. “
- Kritisch gedempt: “De toestand waarin de demping van een oscillator ervoor zorgt dat deze zo snel mogelijk terugkeert naar de evenwichtsstand zonder om deze stand heen en weer te oscilleren. “
- Overgedempt: “De toestand waarin demping van een oscillator ervoor zorgt dat deze zonder te oscilleren terugkeert naar de evenwichtsstand; de oscillator beweegt zich langzamer naar het evenwicht dan in het kritisch gedempte systeem. “
De fysische situatie
De eenvoudige harmonische oscillator beschrijft vele fysische systemen over de hele wereld, maar vroege studies van de fysica beschouwen gewoonlijk alleen ideale situaties waarin geen wrijving optreedt. In de echte wereld echter zullen wrijvingskrachten – zoals luchtweerstand – de beweging van een voorwerp vertragen, of dempen. Soms zijn deze dempende krachten sterk genoeg om een voorwerp na verloop van tijd weer in evenwicht te brengen.
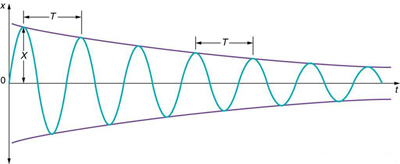
Dempende harmonische beweging: De positie tegen de tijd van ons voorwerp in eenvoudige harmonische beweging. We zien dat voor kleine dempingen de amplitude van onze beweging langzaam afneemt in de tijd.
Het eenvoudigste en meest voorkomende geval doet zich voor wanneer de wrijvingskracht evenredig is met de snelheid van een voorwerp. Merk op dat er andere gevallen bestaan die tot niet-lineaire vergelijkingen kunnen leiden die buiten het bestek van dit voorbeeld vallen.
Beschouw een voorwerp met massa m dat aan een veer met constante k is bevestigd. Stel dat de dempende kracht evenredig is met de snelheid van de massa met een evenredigheidsconstante, b, die de vicieuze dempingscoëfficiënt wordt genoemd. We kunnen deze situatie beschrijven met de tweede wet van Newton, die leidt tot een tweede orde, lineaire, homogene, gewone differentiaalvergelijking. We voegen gewoon een term die de dempingskracht beschrijft toe aan onze reeds bekende vergelijking die een eenvoudige harmonische oscillator beschrijft, om het algemene geval van gedempte harmonische beweging te beschrijven.
begin{array}{text{lcl}} \text{F}_{\text{net}}&&\text{m} \frac{\text{d}^{2}\text{x}}{\text{dt}^2} + \text{b}\frac{\text{dx}}{\text{dt}} + \text{kx} = 0 \ && \frac{\text{d}^2{text{x}}{\text{dt}^2} + \frac{\text{b}}{\text{m}}\frac{\text{dx}}{\text{dt}} + \frac{\text{k}}{\text{m}}{x} = 0 \ &&\frac{\text{d}}^2}{text{x}{\text{dt}^2} + \gamma \frac{\text{dx}}{\text{dt}} + \omega_0^2 \text{x} = 0 \einde{array} \omega_0^2 = \frac{text{k}}{text{m}}, \gamma = \frac{text{b}}{text{m}}
Deze notatie gebruikt \frac{{text{d}}^2text{x}{text{dt}^2}, de versnelling van ons voorwerp, \frac{\text{dx}}{\text{dt}}, de snelheid van ons voorwerp, \omega_0, de ongedempte hoekfrequentie van de trilling, en ɣ, wat we de dempingsverhouding kunnen noemen.
Oplossen van de differentiaalvergelijking; interpreteren van resultaten
We lossen deze differentiaalvergelijking op voor onze bewegingsvergelijking van het systeem, x(t). We gaan uit van een oplossing in de vorm van een exponentiaal, waarbij a een constante waarde is die we zullen oplossen.
(^text{t}) = ^{text{at}}
Als we dit in de differentiaalvergelijking invoeren, zien we dat er drie resultaten zijn voor a, die de beweging van ons systeem zullen dicteren. We kunnen a oplossen met behulp van de kwadratische vergelijking.
Begin{array}{\text{lcl}} \text{F}_{\text{net}}&&\text{a}^{2} \text{x} + \gamma \text{a} \text{x} + \omega_0^2 \text{x} = 0 \ && \text{a}^{2} + \gamma \text{a} + \omega_0^2 = 0 \eind{array}
text{a} = \frac{\gamma \pm \sqrt{\gamma^2 – 4 \omega_0^2}{2}
De fysische situatie heeft drie mogelijke uitkomsten afhankelijk van de waarde van a, die afhangt van de waarde van wat onder onze radicaal staat. Deze uitdrukking kan positief, negatief, of gelijk aan nul zijn, wat resulteert in respectievelijk overdemping, onderdemping en kritische demping.
Het geval van overdemping is > 4{omega_0^2}. In dit geval keert het systeem terug naar het evenwicht door exponentieel af te nemen naar nul. Het systeem zal de evenwichtspositie niet meer dan één keer passeren.
Gamma^2 < 4\omega_0^2 is het Onder Gedempt geval. In dit geval oscilleert het systeem terwijl het langzaam terugkeert naar het evenwicht en neemt de amplitude in de tijd af. Figuur 1 toont een ondergedempt geval.
=4omega_0^2 is hetKritisch gedempt geval. In dit geval keert het systeem zeer snel terug naar het evenwicht zonder te oscilleren en zonder de evenwichtspositie te passeren.