De vraag dringt zich vaak op: “Wat is de normale of standaardvorm van het PID-algoritme (proportioneel-integraal-afgeleide)?”
Het antwoord is zowel eenvoudig als complex. Voordat we op het antwoord ingaan, moeten we eerst de hieronder getoonde schermweergaven bekijken (klik voor een grote weergave van voorbeeld 1 of voorbeeld 2):
 |
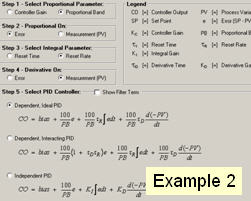 |
Zoals in de schermweergaven te zien is:
▪ Er zijn drie populaire PID algoritme vormen (zie stap 5 in de grote afbeelding weergaven).
▪ Elk van de drie algoritmen heeft afstemmingsparameters en algoritme variabelen die op verschillende manieren kunnen worden gegoten (zie stap 1 – 4 in de grote afbeelding weergaven).
Dus uw leverancier gebruikt misschien een van de tientallen mogelijke algoritme vormen. En als u een filterterm aan uw controller toevoegt, neemt het aantal mogelijkheden aanzienlijk toe.
Het eenvoudige antwoord
Elk van de algoritmen kan dezelfde prestaties leveren als elk van de andere. Er is geen controlevoordeel bij het kiezen van de ene vorm boven de andere. In die zin zijn ze allemaal standaard of normaal.
Als u een aankoop overweegt, kies dan de leverancier die het beste aan uw behoeften voldoet en blijf niet stilstaan bij de bijzonderheden van het algoritme. Enkele dingen om te overwegen zijn:
▪ compatibiliteit met bestaande controllers en bijbehorende hardware en software
▪ kosten
▪ gemak van installatie en onderhoud
▪ betrouwbaarheid
▪ uw gebruiksomgeving (is die schoon? koel? droog?)
Een vollediger antwoord
De meeste van de verschillende algoritme vormen voor controllers zijn te vinden in het ene of het andere product van de leverancier. Sommige leveranciers gebruiken zelfs verschillende vormen binnen hun eigen produktlijnen. Meer informatie is te vinden in dit artikel.
En hoewel de verschillende vormen even geschikt zijn, moet elk worden afgestemd (waarden voor de instelbare parameters moeten worden gespecificeerd) met behulp van afstemmingscorrelaties die speciaal zijn ontworpen voor dat specifieke regelalgoritme.
Commerciële software maakt het eenvoudig om de gewenste prestaties uit elk van hen te halen. Maar het is essentieel dat u uw leverancier en het modelnummer van de regelaar kent om een correcte match tussen de vorm van de regelaar en de berekende afstemmingswaarden te garanderen.
Het alternatief voor een ordelijke ontwerpmethodologie is een “gok en test”-aanpak. Hoewel gebruikt door sommige beoefenaars, dergelijke trial and error tuning verspilt kostbare productietijd, verbruikt meer grondstoffen en nutsvoorzieningen dan nodig is, genereert extra afval en off-spec product, en kan zelfs zorgen voor de veiligheid.
In de meeste artikelen op Controlguru.com gebruiken we een variatie van de afhankelijke, ideale PID-regelaarvorm:

Waarin:
CO = uitgangssignaal van de regelaar
CObias = bias van de regelaar
e(t) = huidige regelaarfout, gedefinieerd als SP – PV
SP = instelpunt
PV = gemeten procesvariabele
Kc = regelaarversterking, een afstemparameter
Ti = resettijd, een afstemparameter
Td = afleestijd, een afstemparameter
Om te benadrukken dat de regelaars allemaal even capabel zijn, gebruiken we af en toe variaties van de afhankelijke, op elkaar inwerkende vorm:

of variaties van de onafhankelijke PID-vorm:

Eindgedachten
De bovenstaande discussie gaat voorbij aan enkele subtiele verschillen in algoritmevorm die we kunnen benutten om de regelprestaties te verbeteren. We zullen meer over deze details te weten komen naarmate we verder leren.
Afgeleide op fout gedraagt zich bijvoorbeeld anders dan afgeleide op gemeten PV. Dit geldt voor alle algoritmen. Afgeleide op fout kan “afslaan” na set point stappen en dit wordt zelden als wenselijk gedrag beschouwd. Daarom wordt afgeleide op PV aanbevolen voor industriële toepassingen.
En als u overweegt de regelaar zelf te programmeren, is het niet de algoritmevorm die de uitdaging vormt. De grote hindernis is het goed verantwoorden van de anti-reset opwinding en jacketing logica om bumpless overgang tussen bedrijfsmodi toe te staan.