Types van stappenmotoren – hun constructie, werking en toepassingen
Inhoudsopgave
De uitvinding van speciale stappenmotordriver-kaarten en andere digitale controletechnologieën voor de interfacing van een stappenmotor met PC-gebaseerde systemen zijn de reden voor de wijdverspreide acceptatie van stappenmotoren in de afgelopen tijd. Stappenmotoren worden de ideale keuze voor automatiseringssystemen die nauwkeurige snelheidsregeling of nauwkeurige positionering of beide vereisen.
Zoals we weten dat veel industriële elektromotoren worden gebruikt met closed-loop feedback control voor het bereiken van nauwkeurige positionering of nauwkeurige snelheidsregeling, aan de andere kant, een stappenmotor in staat om te werken op een open-loop controller. Dit verlaagt op zijn beurt de totale systeemkosten en vereenvoudigt het machineontwerp in vergelijking met servo systeembesturing. Laten we het kort hebben over stappenmotoren en hun types.
- Gerelateerde post: Servomotor – Typen, constructie, werking, & Toepassingen
Wat is een stappenmotor?
De stappenmotor is een borstelloos elektromechanisch apparaat dat de elektrische impulsen die op de bekrachtigingswikkelingen worden uitgezonden, omzet in een nauwkeurig gedefinieerde stapsgewijze rotatie van de as. De as van de motor roteert over een vaste hoek voor elke afzonderlijke puls. Deze rotatie kan lineair of hoekig zijn. Hij krijgt één stap beweging voor een enkele puls input.
Wanneer een trein van pulsen wordt toegepast, wordt deze over een bepaalde hoek gedraaid. De hoek die de as van de stappenmotor maakt voor elke puls wordt de staphoek genoemd, die meestal wordt uitgedrukt in graden.

Het aantal input pulsen gegeven aan de motor beslist de stap hoek en dus de positie van de motor as wordt gecontroleerd door het beheersen van het aantal pulsen. Deze unieke eigenschap maakt de stappenmotor te zijn zeer geschikt voor open-loop controle systeem waarin de exacte positie van de as wordt gehandhaafd met een exact aantal pulsen zonder het gebruik van een feedback sensor.
Als de stap hoek kleiner is, hoe groter zal het aantal stappen per omwentelingen en hoger zal de nauwkeurigheid van de verkregen positie zijn. De staphoek kan zo groot zijn als 90 graden en zo klein als 0,72 graden, maar de meest gebruikte staphoeken zijn 1,8 graden, 2,5 graden, 7,5 graden en 15 graden.
De richting van de asrotatie hangt af van de opeenvolging van pulsen die op de stator worden toegepast. De snelheid van de as of het gemiddelde motortoerental is recht evenredig met de frequentie (de snelheid van de ingangspulsen) van de ingangspulsen die op de bekrachtigingswikkelingen worden toegepast. Bij een lage frequentie draait de stappenmotor dus in stappen en bij een hoge frequentie draait hij door de traagheid continu zoals een gelijkstroommotor.
Zoals alle elektromotoren heeft hij een stator en een rotor. De rotor is het beweegbare deel dat geen wikkelingen, borstels en een commutator heeft. Gewoonlijk zijn de rotoren van het variabel reluctantie of permanent magneet type. De stator is vaak opgebouwd uit meerpolige en meerfasige wikkelingen, gewoonlijk van drie of vier fasen gewikkeld voor een vereist aantal polen dat wordt bepaald door de gewenste hoekverplaatsing per ingangspuls.
In tegenstelling tot andere motoren werkt hij op een geprogrammeerde discrete regelimpuls die via een elektronische aandrijving op de statorwikkelingen wordt toegepast. De rotatie ontstaat door de magnetische wisselwerking tussen de polen van de opeenvolgend bekrachtigde statorwikkelingen en de polen van de rotor.
Er zijn verschillende soorten stappenmotoren beschikbaar op de huidige markt over een breed scala van maten, stappenaantal, constructies, bedrading, tandwieloverbrenging, en andere elektrische kenmerken. Aangezien deze motoren in staat zijn om te werken in discrete aard, deze zijn zeer geschikt om te interfacen met digitale controle-apparaten zoals computers.
Door de precieze controle van snelheid, rotatie, richting, en hoekige positie, deze zijn van bijzonder belang in industriële procescontrolesystemen, CNC-machines, robotica, productie automatiseringssystemen, en instrumentatie.
- Gerelateerde post: Borstelloze gelijkstroommotor – constructie, werkingsprincipe & Toepassingen
Soorten stappenmotoren
Er zijn drie basiscategorieën stappenmotoren, namelijk
- Permanent Magneet Stappenmotor
- Variabele Reluctantie Stappenmotor
- Hybride Stappenmotor
In al deze motoren worden excitatie wikkelingen gebruikt in de stator waarbij het aantal wikkelingen verwijst naar het aantal fasen.
Een gelijkspanning wordt als bekrachtiging op de wikkelingen gezet en elke wikkelingklem is met de bron verbonden via een solid-state schakelaar. Afhankelijk van het type stappenmotor, wordt het rotorontwerp geconstrueerd zoals zacht stalen rotor met saillante polen, cilindrische permanente magneetrotor en permanente magneet met zacht stalen tanden. Laten we deze types in detail bespreken.

- Je kunt ook lezen: Driefasige Motor Aansluiting Ster/Driehoek (Y-Δ) Achteruit / Vooruit met Timer Vermogen & Besturingsdiagram
Variabele Reluctantie Stappenmotor
Het is het basistype stappenmotor dat al heel lang bestaat en het zorgt voor de gemakkelijkste manier om het werkingsprincipe vanuit een structureel oogpunt te begrijpen. Zoals de naam al zegt, hangt de hoekpositie van de rotor af van de reluctantie van het magnetische circuit dat gevormd wordt tussen de statorpolen (tanden) en de rotortanden.

Constructie van Variabele Reluctantie Stappenmotor
Hij bestaat uit een gewikkelde stator en een rotor met zachte ijzerentand rotor. De stator heeft een stapel laminaten van siliciumstaal waarop de statorwikkelingen zijn gewikkeld. Gewoonlijk is hij gewikkeld voor drie fasen die over de poolparen zijn verdeeld.
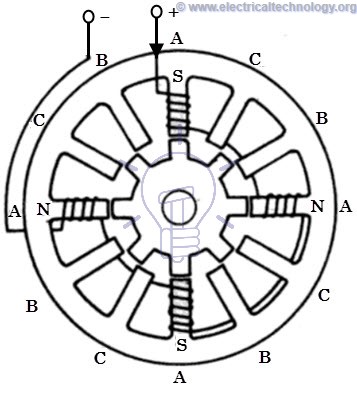
Het aldus gevormde aantal polen op de stator is gelijk aan een even veelvoud van het aantal fasen waarvoor de wikkelingen op de stator zijn gewikkeld. In het onderstaande cijfer, heeft de stator 12 even uit elkaar geplaatste uitstekende polen waar elke pool met een opwindende rol wordt gewonden. Deze drie fasen worden bekrachtigd uit een gelijkstroombron met behulp van solid-state schakelaars.
De rotor draagt geen wikkelingen en is van saillant pooltype dat volledig van lamineringen van gegroefd staal wordt gemaakt. De geprojecteerde tanden van de rotorpool hebben dezelfde breedte als die van stator tanden. Het aantal polen op de stator verschilt van dat van de rotorpolen, wat de mogelijkheid tot zelfstart en tweerichtingsomwenteling van de motor geeft.
De verhouding van de rotorpolen in termen van statorpolen voor een driefasige stappenmotor wordt gegeven als, Nr = Ns ± (Ns / q). Hier is Ns = 12, en q= 3, en dus Nr = 12 ± (12 / 3) = 16 of 8. Een 8-polige constructie rotor zonder bekrachtiging is hieronder afgebeeld.
Werking van Stappenmotor met variabele reluctantie
De stappenmotor werkt volgens het principe dat de rotor in een bepaalde positie uitgelijnd is met de tanden van de bekrachtigingspool in een magnetisch circuit waarin een minimaal reluctantiepad bestaat. Wanneer stroom wordt toegepast op de motor en door het opwinden van een bepaalde wikkeling, produceert het zijn magnetisch veld en ontwikkelt zijn eigen magnetische polen.
Door het resterende magnetisme in de rotormagneet polen, zal het ervoor zorgen dat de rotor beweegt in een zodanige positie dat minimale reluctantie positie te bereiken en dus een set polen van de rotor lijnt uit met de bekrachtigde set polen van de stator. In deze positie komt de as van het magnetische veld van de stator overeen met de as die door twee magnetische polen van de rotor gaat.
Wanneer de rotor op één lijn staat met de statorpolen, heeft hij voldoende magnetische kracht om de as ervan te weerhouden naar de volgende positie te gaan, hetzij met de wijzers van de klok mee of tegen de wijzers van de klok in.
Overweeg het schematische diagram van een 3-fase, 6 statorpolen en 4 rotortanden wordt getoond in onderstaande figuur. Wanneer de fase A-A’ wordt voorzien van een gelijkstroomvoeding door het sluiten van de schakelaar -1, wordt de wikkeling een magneet waardoor één tand Noord wordt en de andere Zuid. De magnetische as van de stator ligt dus langs deze polen.
Door de aantrekkingskracht trekt de Noordpool van de statorwikkeling de dichtstbijzijnde rotortand van de tegenovergestelde polariteit aan, d.w.z. Zuid, en de Zuidpool trekt de dichtstbijzijnde rotortand van de tegenovergestelde polariteit aan, d.w.z. Noord. De rotor stelt zich dan in op zijn minimale reluctantiepositie waar de magnetische as van de rotor precies overeenkomt met de magnetische as van de stator.
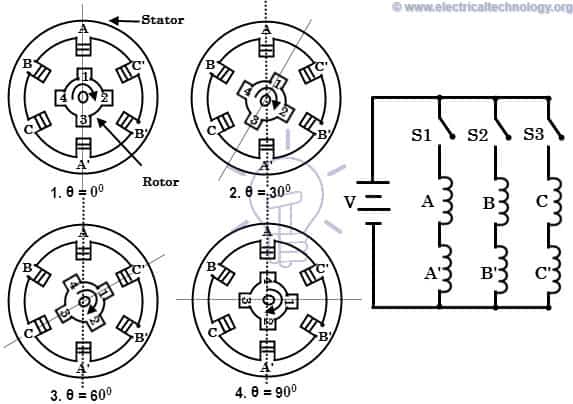
Wanneer fase B-B’ wordt bekrachtigd door schakelaar -2 te sluiten, terwijl fase A-A’ spanningsloos blijft door schakelaar-1 te openen, zal wikkeling B-B’ de magnetische flux produceren en vandaar verschuift de magnetische as van de stator langs de aldus gevormde polen. Hierdoor verschuift de rotor naar de kleinste reluctantie met gemagnetiseerde stator tanden en draait door een hoek van 30 graden in de richting van de klok.
Wanneer de schakelaar-3 wordt bekrachtigd na het openen van schakelaar-2, de fase C-C’ wordt bekrachtigd, de rotor tanden uitlijnen met nieuwe positie door te bewegen door een extra hoek van 30 graden. Door deze manier, beweegt de rotor richting met de wijzers van de klok mee of tegen de wijzers van de klok in door statorwikkelingen in een bepaalde opeenvolging achtereenvolgens op te wekken. De staphoek van deze 3-fase 4-polige rotor tanden stappenmotor wordt uitgedrukt als, 360/ (4 × 3) = 30 graden (als staphoek = 360 / Nr × q).
De staphoek kan verder worden verminderd door het verhogen van het aantal polen op de stator en rotor, in een dergelijk geval motoren zijn vaak gewikkeld met extra fase wikkelingen. Dit kan ook worden bereikt door een andere constructie van stappenmotoren te gebruiken, zoals een multistack opstelling en een reductiemechanisme.
- U kunt ook lezen: Driefasige Motor Aansluiting STAR/DELTA Zonder Timer Power & Besturingsdiagrammen
Permanent Magneet Stappenmotor
De permanent magneet ontwerp motor is misschien wel de meest voorkomende onder de verschillende soorten stappenmotoren. Zoals de naam al aangeeft, zijn er permanente magneten aan de motorconstructie toegevoegd. Dit type stappenmotor wordt ook wel can-stack motor of tin-can motor genoemd. Het belangrijkste voordeel van deze motor is de lage fabricagekost. Dit type motor heeft 48-24 stappen per omwenteling.

Constructie Permanente Magneet Stappenmotor
In deze motor, is de stator multipolair en is de constructie vergelijkbaar met die van de hierboven besproken stappenmotor met variabele reluctantie. Hij bestaat uit een gegroefde periferie waarop statorspoelen zijn gewikkeld. Het heeft geprojecteerde polen op de gegroefde structuur waar de gewikkelde windingen kunnen twee of drie of vier-fase.
De eindterminals van al deze windingen worden uitgekocht en verbonden met de DC opwinding via solid state schakelaars in de aandrijving circuit.
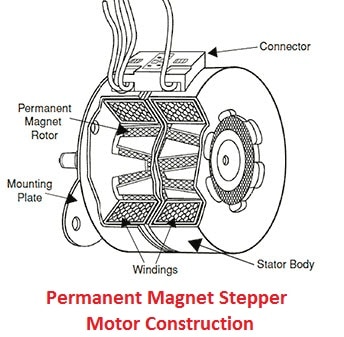
De rotor bestaat uit een permanent magneetmateriaal zoals een ferriet dat in de vorm van een cilindrische of een saillante pool kan zijn, maar gewoonlijk is het van glad cilindrisch type. De rotor is ontworpen om een even aantal permanente magnetische polen te hebben met afwisselend Noord- en Zuidpolariteiten.
Werking van Permanente Magneet Stappenmotor
De werking van deze motor werkt op het principe dat verschillende polen elkaar aantrekken en gelijke polen elkaar afstoten. Wanneer de statorwikkelingen worden bekrachtigd met een gelijkstroomvoeding, produceert dit een magnetische flux en worden de noord- en zuidpool vastgesteld. Door de aantrekkings- en afstotingskracht tussen de permanent magnetische rotorpolen en de statorpolen begint de rotor te bewegen naar de positie waarvoor impulsen aan de stator worden gegeven.
Bedenk een 2-fasestappenmotor met twee permanent magnetische rotorpolen zoals weergegeven in de onderstaande figuur.
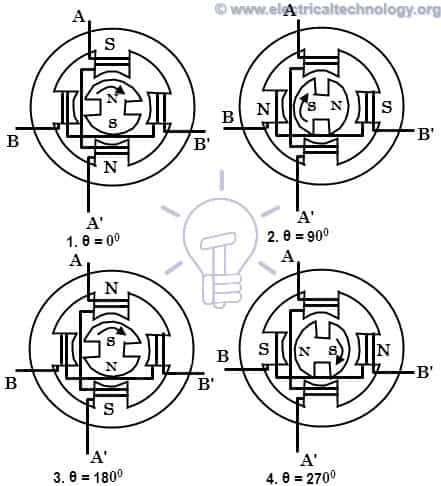
Wanneer fase A onder spanning wordt gezet met een positieve ten opzichte van A’, vormen de wikkelingen Noord- en Zuidpool.
Wanneer de bekrachtiging naar fase B wordt geschakeld en fase A wordt uitgeschakeld, past de rotor zich verder aan de magnetische as van fase B aan, en roteert zo 90 graden met de wijzers van de klok mee.
Als vervolgens fase A wordt bekrachtigd met een negatieve stroom ten opzichte van A’, zorgt de vorming van statorpolen ervoor dat de rotor nog eens 90 graden met de wijzers van de klok mee draait.
Op dezelfde manier, als fase B wordt bekrachtigd met een negatieve stroom door fase A schakelaar te sluiten, draait de rotor nog eens 90 graden in dezelfde richting. Als vervolgens fase A met een positieve stroom wordt bekrachtigd, keert de rotor terug naar zijn oorspronkelijke positie en maakt een volledige omwenteling van 360 graden. Dit impliceert dat, telkens wanneer de stator wordt bekrachtigd, de rotor de neiging heeft om 90 graden met de wijzers van de klok mee te draaien.
De staphoek van deze 2-fase 2-polige permanent magneet rotormotor wordt uitgedrukt als, 360/ (2 × 2) = 90 graden. De stapgrootte kan worden verkleind door twee fasen gelijktijdig te bekrachtigen of een opeenvolging van 1-fase AAN en 2-fase AAN met een juiste polariteit.
- U kunt ook lezen: Termen en definities met betrekking tot motorbesturing en -beveiliging
Hybride stappenmotor
Het is het populairste type stappenmotor omdat het betere prestaties levert dan permanente magneetrotor in termen van stapresolutie, houdkoppel en snelheid. Deze motoren zijn echter duurder dan PM stappenmotoren. Hij combineert de beste eigenschappen van zowel variabele reluctantie als permanente magneet stappenmotoren. Deze motoren worden gebruikt in toepassingen die een zeer kleine staphoek vereisen, zoals 1,5, 1,8 en 2,5 graden.

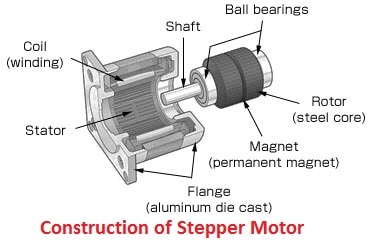
Constructie van hybride stappenmotor
De stator van deze motor is dezelfde als die van zijn permanente magneet of reluctantie tegenhanger. De statorspoelen zijn gewikkeld op wisselende polen. Hierbij worden de spoelen van verschillende fasen op elke pool gewikkeld, gewoonlijk twee spoelen op een pool, wat een bifilaire verbinding wordt genoemd.
De rotor bestaat uit een permanente magneet die in axiale richting wordt gemagnetiseerd om een paar magnetische polen (N- en S-polen) te creëren. Elke pool is bedekt met gelijkmatig verdeelde tanden. De tanden bestaan uit zacht staal en twee secties, waarvan op elke pool de uitlijning een halve tandafstand bedraagt.
- Gerelateerde post Waarom elektrische motoren in kW worden gewaardeerd in plaats van kVA?
Werking van hybride stappenmotor
De werking van deze motor is vergelijkbaar met die van stappenmotor met permanente magneet. Bovenstaande figuur toont een 2-fase, 4-polige, 6-tands rotor hybride stappenmotor. Wanneer de fase A-A’ wordt bekrachtigd met een gelijkstroomvoeding, terwijl B-B’ onbekrachtigd blijft, richt de rotor zich zodanig dat de zuidpool van de rotor tegenover de noordpool van de stator staat, terwijl de noordpool van de rotor tegenover de zuidpool van de stator staat.
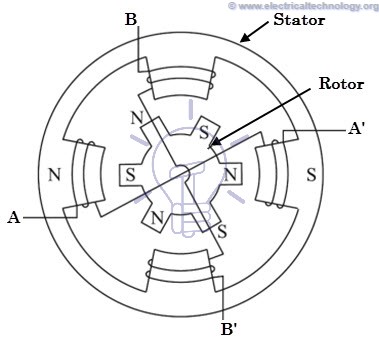
Nu, als de fase B-B’ is bekrachtigd, waarbij A-A’ zodanig wordt uitgeschakeld dat de bovenste pool het noorden wordt en de onderste het zuiden, dan zal de rotor zich in een nieuwe positie brengen door zich in tegenwijzerzin te verplaatsen. Als de fase B-B’ tegengesteld wordt opgewekt, zodanig dat de bovenste pool zuid wordt en de onderste noord, dan zal de rotor in de richting van de wijzers van de klok draaien.
Door een juiste opeenvolging van impulsen naar de stator, zal de motor in de gewenste richting draaien. Bij elke bekrachtiging wordt de rotor in een nieuwe positie vergrendeld, en zelfs als de bekrachtiging wordt verwijderd, behoudt de motor zijn vergrendelde toestand dankzij de permanente magneetbekrachtiging. De staphoek van deze 2-fase, 4-polige, 6-tands rotormotor is gegeven als 360/ (2 × 6) = 30 graden. In de praktijk worden hybride motoren gebouwd met meer rotorpolen om een hoge hoekresolutie te verkrijgen.
- Gerelateerd bericht: Wat is Motorefficiëntie & Hoe het te verbeteren?
Unipolaire en bipolaire stappenmotoren
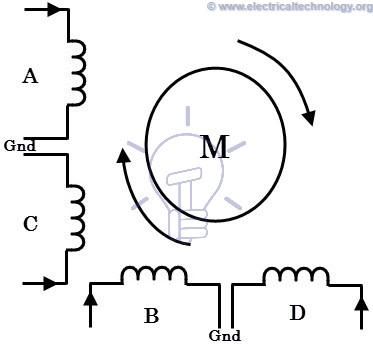
De hierboven besproken motoren kunnen unipolair of bipolair zijn op basis van de wikkeling van de spoelen. Een unipolaire motor wordt gebruikt met twee wikkelingen per fase en daardoor verandert de richting van de stroom door deze wikkelingen de rotatie van de motor. In deze configuratie loopt de stroom door de ene spoel in de ene richting en door de andere spoel in de tegenovergestelde richting.
De onderstaande figuur toont een 2-fase unipolaire stappenmotor waarin de spoelen A en C voor de ene fase zijn en B en D voor de andere fase. In elke fase voert elke spoel stroom in tegengestelde richting van die van de andere spoel. In elke fase zal slechts één spoel tegelijk stroom voeren om een bepaalde draairichting te bereiken. Door de aansluitklemmen van elke spoel om te schakelen, wordt de draairichting geregeld.
In het geval van een bipolaire stappenmotor bestaat elke fase uit een enkele wikkeling in plaats van twee in het geval van een unipolaire. Bij deze motor wordt de draairichting geregeld door de stroom door de wikkelingen om te keren. Daarom is er een complex aandrijfcircuit nodig voor de stroomomkering.

- U kunt ook lezen: Wat is een solenoïde en wat is een solenoïde-magneetveld
Stappenmodi van een stappenmotor
Een typische stappenactie zorgt ervoor dat de motor door een opeenvolging van evenwichtsposities stapt als reactie op stroompulsen die eraan worden gegeven. Het is mogelijk de stappenwerking op verschillende manieren te variëren door eenvoudig de volgorde te veranderen waarin de statorwikkelingen worden bekrachtigd. Hieronder volgen de meest voorkomende werkings- of aandrijfmodi van stappenmotoren.
- Golfstap
- Volledige stap
- Halfstap
- Microstepping

Golfstapmodus
Golfstapmodus is de eenvoudigste van alle andere modi waarin slechts één wikkeling op een gegeven moment onder spanning staat. Elke wikkeling van de fase is beurtelings met de voeding verbonden. De tabel hieronder toont de volgorde waarin de wikkelingen worden bekrachtigd in een 4-fase stappenmotor.
In deze modus geeft de motor een maximale staphoek in vergelijking met alle andere modi. Het is de eenvoudigste en meest gebruikte modus voor stappen, maar het geproduceerde koppel is minder omdat het gebruik maakt van een deel van de totale wikkeling op een gegeven moment.
Full Step Mode
In deze aandrijving of modus worden twee statorfasen tegelijkertijd bekrachtigd op een bepaald moment. Wanneer twee fasen tegelijk worden bekrachtigd, ervaart de rotor het koppel van beide fasen en komt hij in de evenwichtspositie, die wordt afgewisseld tussen twee aangrenzende golfstapposities of eenfasige bekrachtigingen. Deze stap levert dus een beter houdkoppel op dan een golfstap. De onderstaande tabel toont de volledige stap aandrijving voor 4-fase stappenmotor.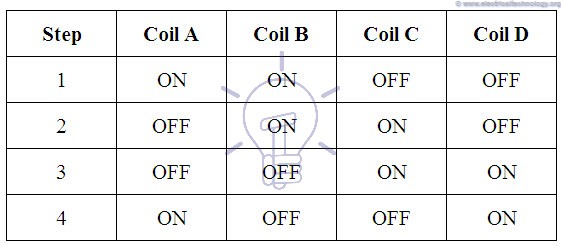
Halve stap modus
Het is de combinatie van zowel golf en volledige stap modi. In deze modus worden afwisselend eenfasige en tweefasige bekrachtigingen uitgevoerd, d.w.z. éénfase AAN, tweefasen AAN, enzovoort. De staphoek in deze modus wordt de helft van de volledige staphoek. Deze aandrijfmodus heeft het hoogste koppel en de grootste stabiliteit vergeleken met alle andere modi. De tabel met de fasenpulsvolgorde voor een 4-fasenmotor in halfstepping staat hieronder.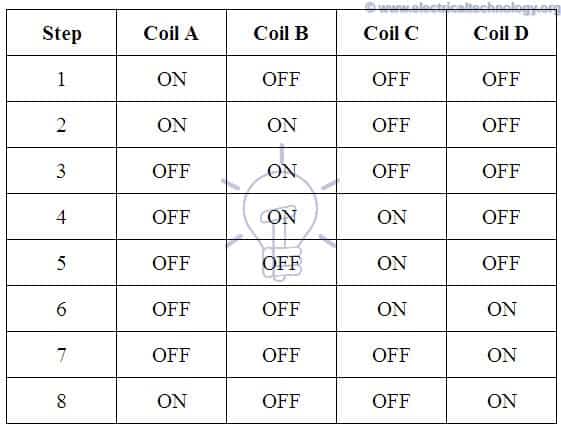
Microstepping-modus
In deze modus wordt elke motorstap onderverdeeld in meerdere kleine stappen, zelfs honderden vaste posities, waardoor een grotere positioneringsresolutie wordt verkregen. In deze modus worden de stromen door de wikkelingen voortdurend gevarieerd om zeer kleine stappen te verkrijgen. Hierbij worden twee fasen gelijktijdig aangeslagen, maar met ongelijke stromen in elke fase.
Bij voorbeeld, de stroom door fase -1 wordt constant gehouden terwijl de stroom door fase-2 in stappen wordt verhoogd tot de maximale waarde van de stroom, of deze nu negatief of positief is. De stroom in fase-1 wordt dan in stappen verlaagd of verhoogd tot nul. De motor zal dus een kleine stapgrootte produceren.
Al deze stapmodi kunnen worden verkregen door elk type stappenmotor dat hierboven is besproken. Echter, de richting van de stroom in elke wikkeling tijdens deze stappen kan worden gevarieerd, afhankelijk van het type motor en of het unipolair of bipolair is.
- Gerelateerde post Kabelgrootteberekening voor LT & HT Motoren
Voordelen van stappenmotor
- Bij stilstand heeft de motor het volledige koppel. Het maakt niet uit of er geen moment of veranderende positie is.
- Het heeft een goede respons op starten, stoppen en omkeren positie.
- Zoals er geen contact borstels in de stappenmotor, Het is betrouwbaar en de levensverwachting is afhankelijk van de lagers van de motor.
- De motor draaihoek is recht evenredig met de ingangssignalen.
- Het is eenvoudig en minder duur om te controleren als motor biedt open lus controle bij het reageren op de digitale ingangssignalen.
- De motorsnelheid is recht evenredig met de frequentie van de ingangspulsen, op deze manier een breed scala van rotatiesnelheid kan worden bereikt.
- Wanneer de belasting aan de as is gekoppeld, is het nog steeds mogelijk om de synchrone rotatie met een laag toerental te realiseren.
- De exacte positionering en herhaalbaarheid van de beweging is goed omdat het een 3-5% nauwkeurigheid van een stap heeft waarbij de fout niet cumulatief is van de ene stap naar de andere.
- Stepper motoren zijn veiliger en goedkoop (in vergelijking met servomotoren), hebben een hoog koppel bij lage snelheden, hoge betrouwbaarheid met eenvoudige constructie die werkt in elke omgeving.
Nadelen van Stepper Motors
- Stepper motoren hebben een laag rendement.
- Het heeft een lage nauwkeurigheid.
- Het koppel daalt zeer snel met de snelheid.
- Als stappenmotor werkt in open lus controle, is er geen feedback om eventuele gemiste stappen aan te geven.
- Het heeft een laag koppel om inertie verhouding betekent dat het niet kan versnellen de belasting zeer snel.
- Ze zijn luidruchtig.
Toepassingen van Stepper Motoren
- Stepper motoren worden gebruikt in geautomatiseerde productie-apparatuur en auto meters en industriële machines zoals verpakking, etikettering, vullen en snijden etc.
- Het wordt veel gebruikt in beveiligingsapparatuur zoals beveiliging & bewakingscamera’s.
- In de medische industrie worden stappenmotoren veel gebruikt in monsters, digitale tandheelkundige fotografie, beademingsapparatuur, vloeistofpompen, bloedanalyse machines en medische scanners etc.
- Ze worden gebruikt in consumentenelektronica in beeldscanners, fotokopieerapparaten en drukmachines en in digitale camera voor automatische zoom en focus functies en posities.
- Stepper motoren ook gebruikt in liften, transportbanden en rijstrook omleidingen.
Je kunt ook lezen:
- DC Drives – Construction, Werking & Classificatie van elektrische gelijkstroomaandrijvingen
- Driekfase motorvermogen & Bedradingsschema’s
- Elektromotoren Bibliotheek (AC & DC )