Tipos de Motores de Degrau – A sua Construção, Funcionamento e Aplicações
Tabela de Conteúdos
A invenção de cartões dedicados de motor passo-a-passo e outras tecnologias de controlo digital para a interface de um motor passo-a-passo com sistemas baseados em PC são a razão para a aceitação generalizada de motores passo-a-passo nos últimos tempos. Os motores passo-a-passo tornam-se a escolha ideal para sistemas de automação que requerem um controlo preciso da velocidade ou um posicionamento preciso ou ambos.
Como sabemos que muitos motores eléctricos industriais são utilizados com controlo de feedback em circuito fechado para obter um posicionamento preciso ou um controlo preciso da velocidade, por outro lado, um motor passo-a-passo capaz de funcionar com um controlador em circuito aberto. Isto, por sua vez, reduz o custo total do sistema e simplifica a concepção da máquina em comparação com o controlo do sistema servo. Vamos discutir brevemente sobre motor passo-a-passo e os seus tipos.
- Posto relacionado: Servo Motor – Tipos, Construção, Funcionamento, & Aplicações
O que é um Motor de Degrau?
Stepper Motor é um dispositivo electromecânico sem escovas que converte o comboio de impulsos eléctricos aplicados nos seus enrolamentos de excitação em rotação mecânica do eixo passo a passo precisamente definida. O eixo do motor roda através de um ângulo fixo para cada impulso discreto. Esta rotação pode ser linear ou angular. Obtém um movimento de um passo para uma única entrada de impulso.
Quando um comboio de impulsos é aplicado, ele é rodado através de um determinado ângulo. O ângulo pelo qual o veio do motor passo-a-passo gira para cada impulso é referido como o ângulo de passo, que é geralmente expresso em graus.

O número de impulsos de entrada dados ao motor decide o ângulo de passo e, portanto, a posição do veio do motor é controlada através do controlo do número de impulsos. Esta característica única torna o motor passo-a-passo bem adequado para um sistema de controlo em circuito aberto em que a posição precisa do veio é mantida com o número exacto de impulsos sem utilizar um sensor de feedback.
Se o ângulo de passo for menor, o maior será o número de passos por rotações e maior será a precisão da posição obtida. Os ângulos de passo podem ser tão grandes como 90 graus e tão pequenos como 0,72 graus, no entanto, os ângulos de passo comummente utilizados são 1,8 graus, 2,5 graus, 7,5 graus e 15 graus.
A direcção da rotação do eixo depende da sequência de impulsos aplicada ao estator. A velocidade do eixo ou a velocidade média do motor é directamente proporcional à frequência (a taxa de impulsos de entrada) dos impulsos de entrada que são aplicados nos enrolamentos de excitação. Portanto, se a frequência for baixa, o motor passo-a-passo gira em passos e, para alta frequência, gira continuamente como um motor CC devido à inércia.
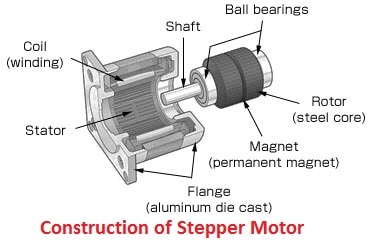
Como todos os motores eléctricos, tem estator e rotor. O rotor é a parte móvel que não tem enrolamentos, escovas e um comutador. Normalmente os rotores ou são de relutância variável ou de tipo íman permanente. O estator é frequentemente construído com enrolamentos multipolares e multifásicos, normalmente de enrolamentos de três ou quatro fases enrolados para um número necessário de pólos decididos pelo deslocamento angular desejado por impulso de entrada.
Não parecido com outros motores, funciona com pulsos de controlo discreto programados que são aplicados aos enrolamentos do estator através de um accionamento electrónico. A rotação ocorre devido à interacção magnética entre os pólos do enrolamento sequencialmente energizado do estator e os pólos do rotor.
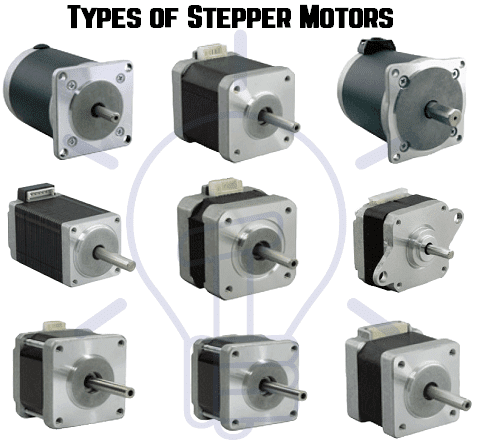
Existem vários tipos de motores passo-a-passo disponíveis no mercado actual numa vasta gama de tamanhos, contagem de passos, construções, cablagem, engrenagens, e outras características eléctricas. Como estes motores são capazes de operar em natureza discreta, são bem adequados para interagir com dispositivos de controlo digital como computadores.
p>Devem ao controlo preciso da velocidade, rotação, direcção, e posição angular, são de particular interesse em sistemas de controlo de processos industriais, máquinas CNC, robótica, sistemas de automatização de fabrico, e instrumentação.
- li>Posto Relacionado: Motor CC Sem Escovas – Construção, Princípio de Funcionamento & Aplicações
Tipos de Motores Stepper
Existem três categorias básicas de motores passo-a-passo, nomeadamente
- Motor passo-a-passo de íman permanente
- Motor passo-a-passo de relutância variável
- Motor passo-a-passo híbrido
/li>
Em todos estes motores são empregues enrolamentos de excitação no estator onde o número de enrolamentos se refere ao número de fases.
Uma tensão DC é aplicada como excitação às bobinas dos enrolamentos e cada terminal de enrolamento é ligado à fonte através de um interruptor de estado sólido. Depende do tipo de motor passo a passo, o seu desenho de rotor é construído tal como rotor de aço macio com pólos salientes, rotor de íman permanente cilíndrico e íman permanente com dentes de aço macio. Vamos discutir estes tipos em detalhe.
- também se pode ler: Ligação Motor Trifásico Star/Delta (Y-Δ) Inverter / Avançar com Potência do Temporizador & Diagrama de Controlo
Motor passo-a-passo de relutância variável
É o tipo básico de motor passo-a-passo que existe há muito tempo e assegura a forma mais fácil de compreender o princípio de funcionamento de um ponto de vista estrutural. Como o nome sugere, a posição angular do rotor depende da relutância do circuito magnético formado entre os pólos do estator (dentes) e os dentes do rotor.

Construção do motor passo a passo de relutância variável
Consiste num estator enrolado e num ferro macio multirotor do dente. O estator tem uma pilha de laminações de aço silício sobre as quais são enrolados os enrolamentos do estator. Normalmente, é enrolado durante três fases que são distribuídas entre os pares de pólos.
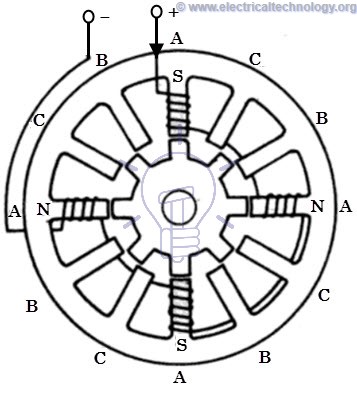
O número de pólos no estator assim formado é igual a um múltiplo uniforme do número de fases para as quais os enrolamentos são enrolados no estator. Na figura abaixo, o estator tem 12 pólos de projecção igualmente espaçados onde cada pólo é enrolado com uma bobina excitante. Estas três fases são energizadas a partir de uma fonte DC com a ajuda de interruptores de estado sólido.
O rotor não transporta enrolamentos e é do tipo de poste saliente feito inteiramente de laminações de aço ranhurado. Os dentes projectados do pólo do rotor têm a mesma largura que os dos dentes do estator. O número de pólos do estator difere do número de pólos do rotor, o que proporciona a capacidade de auto arranque e rotação bidireccional do motor.
A relação dos pólos do rotor em termos de pólos do estator para um motor passo-a-passo de três fases é dada como, Nr = Ns ± (Ns / q). Aqui Ns = 12, e q= 3, e portanto Nr = 12 ± (12 / 3) = 16 ou 8. Um rotor de construção de 8 pólos sem qualquer excitação é ilustrado abaixo.
Trabalho de Motor passo-a-passo de relutância variável
O motor passo-a-passo funciona com base no princípio de que o rotor se alinha numa posição particular com os dentes do pólo de excitação num circuito magnético onde existe uma trajectória de relutância mínima. Sempre que a potência é aplicada ao motor e ao excitar um determinado enrolamento, este produz o seu campo magnético e desenvolve os seus próprios pólos magnéticos.
Due ao magnetismo residual nos pólos magnéticos do rotor, fará com que o rotor se mova em tal posição de modo a atingir uma posição mínima de relutância e, por conseguinte, um conjunto de pólos de rotor alinha-se com o conjunto energizado de pólos do estator. Nesta posição, o eixo do campo magnético do estator coincide com o eixo que passa por quaisquer dois pólos magnéticos do rotor.
Quando o rotor se alinha com os pólos do estator, tem força magnética suficiente para manter o eixo a partir da posição seguinte, no sentido dos ponteiros do relógio ou no sentido contrário ao dos ponteiros do relógio.
Considerando o diagrama esquemático de uma 3 fases, 6 pólos do estator e 4 dentes do rotor é mostrado na figura abaixo. Quando a fase A-A’ é fornecida com uma alimentação DC fechando o interruptor -1, o enrolamento torna-se um íman que resulta num dente que se torna Norte e outro Sul. Assim, o eixo magnético do estator situa-se ao longo destes pólos.
Due à força de atracção, a bobina do estator Pólo Norte atrai o dente de rotor mais próximo de polaridade oposta, ou seja, Pólo Sul e Pólo Sul atraem o dente de rotor mais próximo de polaridade oposta, ou seja, Norte. O rotor ajusta-se então à sua posição de relutância mínima, onde o eixo magnético do rotor coincide exactamente com o eixo magnético do estator.
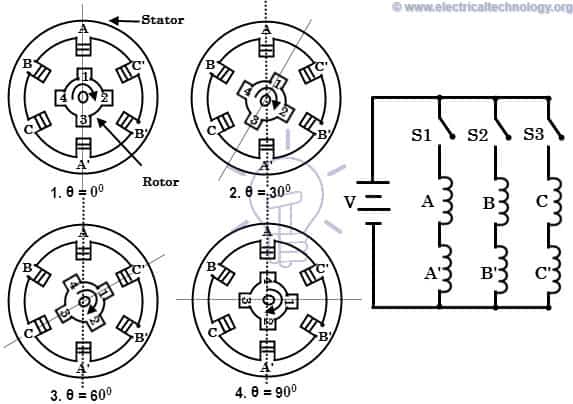
Quando a fase B-B’ é energizada pelo interruptor de fecho -2 mantendo a fase A-A’ permanece desenergizada pelo interruptor de abertura-1, O “enrolamento B-B” produzirá o fluxo magnético e, consequentemente, o eixo magnético do estator desloca-se ao longo dos pólos assim formados por ele. Assim, o rotor desloca-se para a menor relutância com dentes de estator magnetizados e gira através de um ângulo de 30 graus no sentido dos ponteiros do relógio.
Quando o interruptor-3 é energizado após a abertura do interruptor-2, a fase C-C’ é energizada, os dentes de rotor alinham-se com a nova posição movendo-se através de um ângulo adicional de 30 graus. Deste modo, o rotor move-se no sentido dos ponteiros do relógio ou no sentido contrário ao dos ponteiros do relógio através de enrolamentos sucessivamente excitantes do estator numa determinada sequência. O ângulo de passo deste motor passo-a-passo de dentes de rotor de 4 pólos trifásico é expresso como, 360/ (4 × 3) = 30 graus (como ângulo de passo = 360 / Nr × q).
O ângulo de passo pode ser ainda mais reduzido aumentando o número de pólos no estator e rotor, neste caso, os motores são frequentemente enrolados com enrolamentos de fase adicionais. Isto também pode ser conseguido através da adopção de uma construção diferente de motores passo-a-passo, tais como arranjo multistack e mecanismo de engrenagem de redução.
- li> Também se pode ler: Ligação do motor trifásico STAR/DELTA sem potência do temporizador & Diagramas de controlo
Motor passo-a-passo de íman permanente
O motor passo-a-passo de desenho permanente é talvez o mais comum entre vários tipos de motores passo-a-passo. Como o nome indica, adiciona ímanes permanentes à construção do motor. Este tipo de motores passo-a-passo é também referido como motor de lata ou motor de lata de lata. A principal vantagem deste motor é o seu baixo custo de fabrico. Este tipo de motor tem 48-24 passos por revolução.

Motor passo-a-passo de íman permanente de construção
Neste motor, o estator é de multipolar e a sua construção é semelhante à do motor passo-a-passo de relutância variável, tal como discutido acima. Consiste na periferia com fendas em que as bobinas do estator são enroladas. Tem pólos projectados na estrutura ranhurada onde os enrolamentos enrolamentos enrolados podem ser de duas ou três ou quatro fases.
Os terminais finais de todos estes enrolamentos são comprados e ligados à excitação CC através de interruptores de estado sólido no circuito de accionamento.
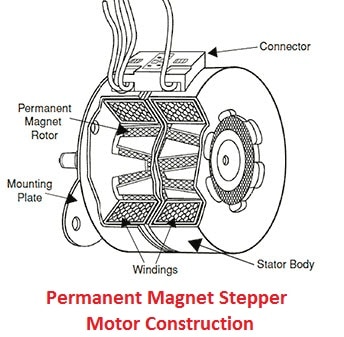
O rotor é constituído por um material de íman permanente como uma ferrite que pode ter a forma de um pólo cilíndrico ou saliente, mas normalmente é de tipo cilíndrico liso. O rotor concebido para ter um número par de pólos magnéticos permanentes com polaridades alternadas Norte e Sul.
Funcionamento do motor passo-a-passo de íman permanente
O funcionamento deste motor funciona com base no princípio de que, ao contrário dos pólos, se atraem uns aos outros e como os pólos se repelem uns aos outros. Quando os enrolamentos do estator são excitados com um fornecimento de corrente contínua, produz fluxo magnético e estabelece os pólos Norte e Sul. Devido à força de atracção e repulsão entre pólos de rotor de íman permanente e pólos de estator, o rotor começa a mover-se até à posição para a qual os impulsos são dados ao estator.
Considerar um motor passo-a-passo de 2 fases com dois pólos de rotor magnético permanente, como mostra a figura abaixo.
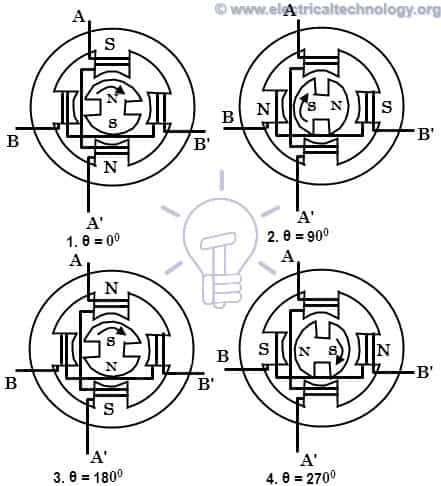
Quando a fase A é energizada com um positivo em relação ao A’, os enrolamentos estabelecem pólos Norte e Sul. Devido à força de atracção, os pólos do rotor alinham com os pólos do estator de modo a que o eixo do pólo magnético do rotor se ajuste com o do estator, como mostra a figura.
Quando a excitação é comutada para a fase B e se desliga a fase A, o rotor ajusta-se ainda mais ao eixo magnético da fase B, e assim gira 90 graus no sentido dos ponteiros do relógio.
P>Próximo, se a fase A for energizada com uma corrente negativa em relação a A’, a formação de pólos estatorizados faz com que o rotor se mova através de outros 90 graus no sentido dos ponteiros do relógio.
Da mesma forma, se a fase B for excitada com uma corrente negativa fechando o interruptor da fase A, o rotor gira através de outros 90 graus no mesmo sentido. A seguir, se a fase A for excitada com corrente positiva, o rotor chega à posição original fazendo assim uma revolução completa de 360 graus. Isto implica que, sempre que o estator é excitado, o rotor tende a rodar 90 graus no sentido dos ponteiros do relógio.
O ângulo de passo deste motor de rotor de íman permanente de 2 pólos, de 2 fases, é expresso como, 360/ (2 × 2) = 90 graus. O tamanho do passo pode ser reduzido energizando duas fases simultaneamente ou uma sequência de modos ON monofásico e ON bifásico com uma polaridade adequada.
- Também se pode ler: Termos e Definições relacionados com o Controlo e Protecção do Motor
Motor Híbrido de Degrau
É o tipo de motor de degrau mais popular, uma vez que proporciona melhor desempenho do que o rotor de íman permanente em termos de resolução de degraus, mantendo o binário e a velocidade. Contudo, estes motores são mais caros do que os motores passo-a-passo PM. Combina as melhores características tanto de relutância variável como de motores passo-a-passo de íman permanente. Estes motores são utilizados em aplicações que requerem ângulos de passo muito pequenos, tais como 1,5, 1,8 e 2,5 graus.

Construção de motor passo-a-passo híbrido
O estator deste motor é o mesmo que o seu homólogo do tipo de íman permanente ou de relutância. As bobinas do estator são enroladas em pólos alternados. Neste, as bobinas de diferentes fases são enroladas em cada pólo, normalmente duas bobinas num pólo que é referido como ligação bifilar.
O rotor consiste num íman permanente que é magnetizado no sentido axial para criar um par de pólos magnéticos (pólos N e S). Cada pólo é coberto com dentes uniformemente espaçados. Os dentes são constituídos por aço macio e duas secções, das quais em cada pólo estão desalinhadas por um passo de meio dente.
- li>Posto Relacionado Porquê Motores Eléctricos classificados em kW em vez de kVA?
Trabalho do Motor Híbrido Passo-a-Ponto
Este motor funciona de forma semelhante ao do motor passo-a-passo de íman permanente. A figura acima mostra um motor passo-a-passo híbrido de rotor bifásico, de 4 pólos e 6 dentes. Quando a fase A-A’ é excitada com um fornecimento DC, mantendo B-B’ não excitado, o rotor alinha de tal forma que o pólo sul do rotor está virado para o pólo norte do estator, enquanto que o pólo norte do rotor está virado para o pólo sul do estator.
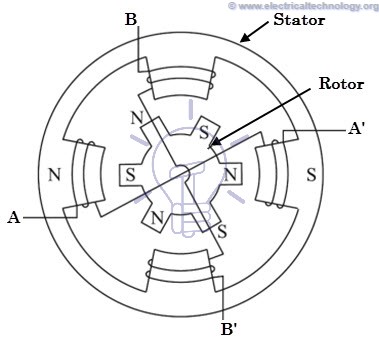
Now, se a fase B-B’ estiver excitada, mantendo A-A’ desligado de tal forma que o pólo superior se torna norte e o inferior se torna sul, então o rotor alinhar-se-á para uma nova posição movendo-se no sentido contrário ao dos ponteiros do relógio. Se a fase B-B’ estiver excitada em sentido contrário, de modo a que o pólo superior se torne sul e o inferior se torne norte, então o rotor girará no sentido dos ponteiros do relógio.
Por uma sequência adequada de impulsos para o estator, o motor girará na direcção desejada. Para cada excitação, o rotor ficará bloqueado numa nova posição, e mesmo que a excitação seja removida, o motor ainda mantém a sua condição de bloqueio devido à excitação com íman permanente. O ângulo de passo deste motor de rotor de 2 fases, 4 pólos e 6 dentes é dado como 360/ (2 × 6) = 30 graus. Na prática, os motores híbridos são construídos com mais número de pólos de rotor de modo a obter uma alta resolução angular.
- Posto relacionado: O que é Eficiência Motora & Como melhorá-la?
Motores Stepper Unipolares e Bipolares
Os motores discutidos acima podem ser unipolares ou bipolares com base nos arranjos de enrolamento da bobina. Um motor unipolar é utilizado com dois enrolamentos por fase e, portanto, a direcção do fluxo de corrente através destes enrolamentos altera a rotação do motor. Nesta configuração, o fluxo de corrente passa numa direcção numa bobina e na direcção oposta noutra bobina.
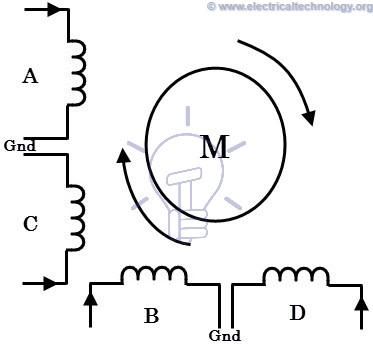
A figura abaixo mostra um motor passo-a-passo unipolar bifásico em que as bobinas A e C são para uma fase e B e D são para outra fase. Em cada fase, cada bobina transporta corrente em direcção oposta à de outra bobina. Apenas uma bobina transportará corrente de cada vez em cada fase para alcançar uma determinada direcção de rotação. Assim, apenas comutando os terminais para cada bobina, a direcção da rotação é controlada.
No caso de um motor passo-a-passo bipolar, cada fase consiste num único enrolamento em vez de dois no caso de um unipolar. Neste, a direcção da rotação é controlada invertendo a corrente através dos enrolamentos. Assim, é necessário um circuito de accionamento complexo para a inversão da corrente.

ul>>>li> também se pode ler: O que é um Solenóide e Campo Magnético Solenóide
Modos de passo de um Motor Stepper
Uma acção de passo típica faz com que o motor passe por uma sequência de posições de equilíbrio em resposta aos impulsos de corrente que lhe são dados. É possível variar a acção passo a passo de diferentes maneiras simplesmente alterando a sequência através da qual os enrolamentos do estator são energizados. Seguem-se os modos mais comuns de funcionamento ou de condução de motores passo-a-passo.
- Passo de onda
- Passo cheio
- Passo de meio passo
- Microstepping

Wave Step Mode
Wave step mode é o mais simples de todos os outros modos em que apenas um enrolamento é energizado num determinado momento. Cada bobina da fase é ligada à alimentação alternativamente. A tabela abaixo mostra a ordem pela qual as bobinas são energizadas num motor passo-a-passo de 4 fases.
Neste modo o motor dá o ângulo máximo de passo em relação a todos os outros modos. É o modo mais simples e mais comummente utilizado para passos; contudo, o binário produzido é menor, pois utiliza alguma parte do enrolamento total num dado momento.
Modo de Passo Completo -br>
Neste motor ou modo, duas fases do estator são energizadas simultaneamente num dado momento. Quando duas fases são energizadas em conjunto, o rotor irá experimentar o torque de ambas as fases e chega à posição de equilíbrio, que será intercalada entre duas posições de passos de onda adjacentes ou excitações de uma fase. Assim, este passo proporciona um melhor torque de retenção do que o passo de onda. A tabela abaixo mostra o passo completo do motor passo-a-passo de 4 fases.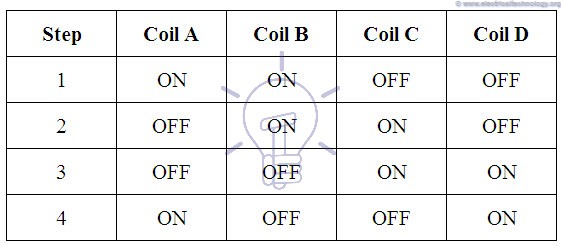
Modo Meio Passo
É a combinação de ambos os modos de onda e passo completo. Neste, as excitações monofásica e bifásica são realizadas alternadamente, ou seja, uma fase ON, duas fases ON, e assim por diante. O ângulo de degrau neste modo torna-se metade do ângulo de degrau completo. Este modo de condução tem o maior torque e estabilidade em comparação com todos os outros modos. A tabela contendo a sequência de impulsos de fase para um motor de 4 fases em meio passo é dada abaixo.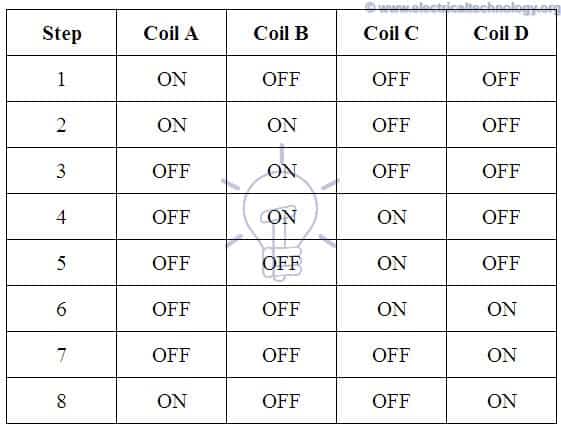
Modo Microstepping
Neste modo, cada passo do motor é subdividido em vários pequenos passos, mesmo centenas de posições fixas, obtendo-se assim uma maior resolução de posicionamento. Neste modo, as correntes através dos enrolamentos são continuamente variadas de modo a obter passos muito pequenos. Nisto, duas fases são excitadas simultaneamente, mas com as correntes desiguais em cada fase.
Por exemplo, a corrente através da fase -1 é mantida constante enquanto a corrente através da fase -2 é incrementada em passos até ao valor máximo da corrente, seja ela negativa ou positiva. A corrente na fase -1 é então diminuída ou aumentada em passos até ao valor zero. Assim, o motor produzirá um pequeno tamanho de passo.
Todos estes modos de passo podem ser obtidos por cada tipo de motor passo discutido acima. Contudo, a direcção da corrente em cada enrolamento durante estes passos pode variar dependendo do tipo de motor e ou é unipolar ou bipolar.
- li> Cálculo do tamanho do cabo do poste relacionado para LT & Motores HT
Vantagens do motor passo-a-passo
- Na posição de paragem, o motor tem o binário total. Não importa se não há momento ou mudança de posição.
- Tem uma boa resposta à posição de arranque, paragem e inversão.
- Como não há escovas de contacto no motor passo-a-passo, é fiável e a esperança de vida depende dos rolamentos do motor.
- O ângulo de rotação do motor é directamente proporcional aos sinais de entrada.
- É simples e menos dispendioso de controlar, uma vez que o motor fornece controlo em malha aberta ao responder aos sinais de entrada digitais.
- A velocidade do motor é directamente proporcional à frequência dos impulsos de entrada, desta forma é possível alcançar uma vasta gama de velocidade de rotação.
- Quando a carga é acoplada ao eixo, ainda é possível realizar a rotação síncrona com baixa velocidade.
- O posicionamento exacto e a repetibilidade do movimento é bom, pois tem uma precisão de 3-5% de um passo em que o erro não é cumulativo de um passo para outro.
- Motores Stepper são mais seguros e de baixo custo (em comparação com os servomotores), tendo elevado binário a baixas velocidades, alta fiabilidade com construção simples que funciona em qualquer ambiente.
Desvantagens dos Motores Stepper
- Motores Stepper com baixa Eficiência.
- Tem baixa Precisão.
- O binário diminui muito rapidamente com a velocidade.
- Como o motor passo-a-passo funciona em controlo de circuito aberto, não há feedback para indicar potenciais passos perdidos.
- Tem baixa relação binário/inércia significa que não pode acelerar a carga muito rapidamente.
- São ruidosos.
Aplicações de Motores Stepper
- Motores Stepper são utilizados em equipamentos de produção automatizada e calibradores de automóveis e máquinas industriais como embalagem, etiquetagem, enchimento e corte, etc.
- É amplamente utilizado em dispositivos de segurança tais como segurança & câmaras de vigilância.
- Na indústria médica, os motores passo-a-passo são amplamente utilizados em amostras, fotografia dentária digital, respiradores, bombas de fluidos, máquinas de análise de sangue e scanners médicos, etc.
- São utilizados na electrónica de consumo em scanners de imagem, fotocopiadoras e máquinas de impressão e em câmaras digitais para zoom automático e funções e posições de focagem.
- Motores passo-a-passo também utilizados em elevadores, tapetes rolantes e desviadores de faixas.
P>Pode também ler:
- DC Motores – Construção, Trabalho & Classificação dos Accionamentos Eléctricos DC
- Potência do Motor Trifásico & Diagramas de Cablagem de Controlo
- Biblioteca de Motores Eléctricos (AC & DC )