La pregunta que surge con bastante frecuencia es: «¿Cuál es la forma normal o estándar del algoritmo PID (proporcional-integral-derivativo)?»
La respuesta es a la vez simple y compleja. Antes de explorar la respuesta, considere las visualizaciones en pantalla que se muestran a continuación (haga clic para ver en grande el ejemplo 1 o el ejemplo 2):
 |
 |
Como se muestra en las pantallas:
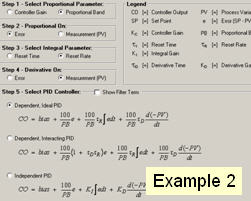
▪ Hay tres formas populares de algoritmos PID (ver el paso 5 en las vistas de imágenes grandes).
▪ Cada uno de los tres algoritmos tiene parámetros de sintonización y variables de algoritmo que pueden ser fundidos de diferentes maneras (ver los pasos 1 – 4 en las vistas de imágenes grandes).
Así que su proveedor podría estar usando una de las docenas de posibles formas de algoritmos. Y si añade un término de filtro a su controlador, el número de posibilidades aumenta sustancialmente.
La respuesta sencilla
Cualquiera de los algoritmos puede ofrecer el mismo rendimiento que cualquiera de los otros. No hay ningún beneficio de control por elegir una forma sobre otra. Todos son estándar o normales en ese sentido.
Si está considerando una compra, seleccione el proveedor que mejor sirva a sus necesidades y no se detenga en los detalles del algoritmo. Algunos aspectos a tener en cuenta son:
▪ la compatibilidad con los controladores existentes y el hardware y software asociados
▪ el coste
▪ la facilidad de instalación y mantenimiento
▪ la fiabilidad
▪ su entorno operativo (¿está limpio? ¿frío? ¿seco?)
Una respuesta más completa
La mayoría de las diferentes formas de algoritmos de los controladores pueden encontrarse en el producto de un proveedor u otro. Algunos proveedores incluso utilizan diferentes formas dentro de sus propias líneas de productos. Puede encontrar más información en este artículo.
Y aunque las distintas formas son igualmente capaces, cada una debe ser ajustada (deben especificarse los valores de los parámetros ajustables) utilizando correlaciones de ajuste específicamente diseñadas para ese algoritmo de control en particular.
El software comercial hace que sea sencillo obtener el rendimiento deseado de cualquiera de ellos. Pero es esencial que conozca su proveedor y el número de modelo del controlador para garantizar una correspondencia correcta entre la forma del controlador y los valores de sintonización calculados.
La alternativa a una metodología de diseño ordenada es un enfoque de «adivinar y probar». Si bien es utilizado por algunos profesionales, esta sintonía de prueba y error desperdicia un valioso tiempo de producción, consume más materia prima y servicios públicos de los necesarios, genera residuos adicionales y productos fuera de especificación, e incluso puede presentar problemas de seguridad.
En la mayoría de los artículos de Controlguru.com, utilizamos alguna variación de la forma de controlador PID dependiente e ideal:

Donde:
CO = señal de salida del controlador
CObias = sesgo del controlador
e(t) = error actual del controlador, definido como SP – PV
SP = punto de consigna
PV = variable de proceso medida
Kc = ganancia del controlador, un parámetro de sintonía
Ti = tiempo de reposición, un parámetro de sintonía
Td = tiempo de derivación, un parámetro de sintonía
Para reforzar que los controladores son todos igual de capaces, ocasionalmente utilizamos variaciones de la forma dependiente e interactiva:

o variaciones de la forma PID independiente:

Pensamientos finales
La discusión anterior pasa por alto algunas de las sutiles diferencias en la forma del algoritmo que podemos explotar para mejorar el rendimiento del control. Aprenderemos sobre estos detalles a medida que avancemos en nuestro aprendizaje.
Por ejemplo, la derivada sobre el error se comporta de forma diferente a la derivada sobre el PV medido. Esto es cierto para todos los algoritmos. La derivada sobre el error puede «patear» después de los pasos del punto de ajuste y esto rara vez se considera un comportamiento deseable. Por lo tanto, la derivada sobre PV se recomienda para aplicaciones industriales.
Y si está considerando programar el controlador usted mismo, no es la forma del algoritmo lo que constituye el desafío. El gran obstáculo es tener en cuenta adecuadamente la lógica de antireposición y de encamisado para permitir la transición sin obstáculos entre los modos de funcionamiento.