Tipos de motores paso a paso – Su construcción, funcionamiento y aplicaciones
Tabla de contenidos
La invención de tarjetas de controladores de motores paso a paso dedicados y otras tecnologías de control digital para la interconexión de un motor paso a paso con sistemas basados en PC son la razón de la aceptación generalizada de los motores paso a paso en los últimos tiempos. Los motores paso a paso se han convertido en la opción ideal para los sistemas de automatización que requieren un control preciso de la velocidad o un posicionamiento preciso, o ambos.
Como sabemos, muchos motores eléctricos industriales se utilizan con un control de retroalimentación de bucle cerrado para lograr un posicionamiento preciso o un control preciso de la velocidad, en cambio, un motor paso a paso puede funcionar con un controlador de bucle abierto. Esto, a su vez, reduce el coste total del sistema y simplifica el diseño de la máquina en comparación con el control del sistema servo. Hablemos brevemente sobre el motor paso a paso y sus tipos.
- Post relacionado: Servomotor – Tipos, Construcción, Funcionamiento, & Aplicaciones
¿Qué es un motor paso a paso?
El motor paso a paso es un dispositivo electromecánico sin escobillas que convierte el tren de impulsos eléctricos aplicados en sus bobinas de excitación en una rotación mecánica del eje definida con precisión paso a paso. El eje del motor gira a través de un ángulo fijo para cada pulso discreto. Esta rotación puede ser lineal o angular.Consigue un movimiento escalonado para una sola entrada de pulso.
Cuando se aplica un tren de pulsos, se hace girar a través de un ángulo determinado. El ángulo por el que gira el eje del motor paso a paso por cada pulso se denomina ángulo de paso, que generalmente se expresa en grados.

El número de pulsos de entrada dados al motor decide el ángulo de paso y por lo tanto la posición del eje del motor se controla mediante el control del número de pulsos. Esta característica única hace que el motor paso a paso sea muy adecuado para el sistema de control de bucle abierto en el que la posición precisa del eje se mantiene con el número exacto de pulsos sin utilizar un sensor de retroalimentación.
Si el ángulo de paso es menor, mayor será el número de pasos por revoluciones y mayor será la precisión de la posición obtenida. Los ángulos de paso pueden ser tan grandes como 90 grados y tan pequeños como 0,72 grados, sin embargo, los ángulos de paso comúnmente utilizados son 1,8 grados, 2,5 grados, 7,5 grados y 15 grados.
El sentido de giro del eje depende de la secuencia de pulsos aplicados al estator. La velocidad del eje o la velocidad media del motor es directamente proporcional a la frecuencia (la tasa de pulsos de entrada) de los pulsos de entrada que se aplican en los devanados de excitación. Por lo tanto, si la frecuencia es baja, el motor paso a paso gira por pasos y para una frecuencia alta, gira continuamente como un motor de corriente continua debido a la inercia.
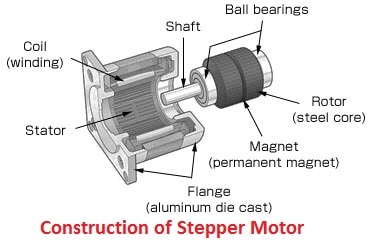
Como todos los motores eléctricos, tiene estator y rotor. El rotor es la parte móvil que no tiene devanados, escobillas y un conmutador. Normalmente los rotores son de reluctancia variable o de imanes permanentes. El estator se construye a menudo con devanados multipolares y multifásicos, generalmente de tres o cuatro devanados de fase enrollados para un número requerido de polos decidido por el desplazamiento angular deseado por pulso de entrada.
A diferencia de otros motores, funciona con pulsos de control discretos programados que se aplican a los devanados del estator a través de un accionamiento electrónico. La rotación se produce debido a la interacción magnética entre los polos del devanado del estator energizados secuencialmente y los polos del rotor.
Hay varios tipos de motores paso a paso disponibles en el mercado actual en una amplia gama de tamaños, número de pasos, construcciones, cableado, engranajes y otras características eléctricas. Como estos motores son capaces de operar en la naturaleza discreta, estos son muy adecuados para la interfaz con los dispositivos de control digital como los ordenadores.
Debido al control preciso de la velocidad, la rotación, la dirección y la posición angular, estos son de particular interés en los sistemas de control de procesos industriales, máquinas CNC, robótica, sistemas de automatización de fabricación, y la instrumentación.
- Post relacionado: Motor de corriente continua sin escobillas – Construcción, principio de funcionamiento & Aplicaciones
Tipos de motores paso a paso
Hay tres categorías básicas de motores paso a paso, a saber
- Motor paso a paso de imán permanente
- Motor paso a paso de reluctancia variable
- Motor paso a paso híbrido
- También puedes leer: Conexión de motores trifásicos en estrella/triángulo (Y-Δ) Inversión/avance con potencia de temporizador & Diagrama de control
- También puede leer: Conexión del motor trifásico STAR/DELTA sin alimentación del temporizador & Diagramas de control
- También puede leer: Términos y definiciones relacionados con el control y la protección de motores
- Post relacionado ¿Por qué los motores eléctricos se clasifican en kW en lugar de kVA?
- Post relacionado: Qué es la eficiencia del motor & ¿Cómo mejorarla?
- También puedes leer: Qué es un solenoide y el campo magnético del solenoide
En todos estos motores se emplean devanados de excitación en el estator donde el número de devanados se refiere al número de fases.
Se aplica una tensión continua como excitación a las bobinas de los devanados y cada terminal del devanado se conecta a la fuente a través de un interruptor de estado sólido. Dependiendo del tipo de motor paso a paso, el diseño de su rotor se construye como rotor de acero suave con polos salientes, rotor cilíndrico de imán permanente e imán permanente con dientes de acero suave. Vamos a discutir estos tipos en detalle.

Motor paso a paso de reluctancia variable
Es el tipo básico de motor paso a paso que ha existido durante mucho tiempo y asegura la forma más fácil de entender el principio de funcionamiento desde un punto de vista estructural. Como su nombre indica, la posición angular del rotor depende de la reluctancia del circuito magnético formado entre los polos del estator (dientes) y los dientes del rotor.

Construcción del motor paso a paso de reluctancia variable
Se compone de un estator bobinado y de un rotor de hierro dulce multidientes. El estator tiene una pila de láminas de acero al silicio en la que se enrollan los devanados del estator. Normalmente, se enrolla para tres fases que se distribuyen entre los pares de polos.
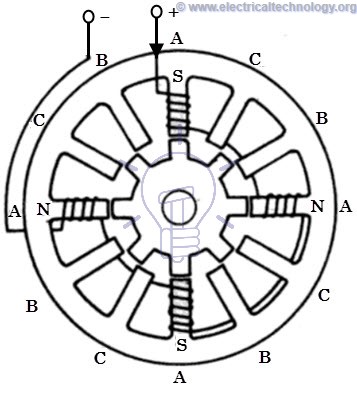
El número de polos en el estator así formado es igual a un múltiplo par del número de fases para las que se enrollan los devanados en el estator. En la figura siguiente, el estator tiene 12 polos salientes igualmente espaciados donde cada polo está enrollado con una bobina excitadora. Estas tres fases son energizadas desde una fuente de corriente continua con la ayuda de interruptores de estado sólido.
El rotor no lleva devanados y es del tipo de polo saliente hecho completamente de láminas de acero ranuradas. Los dientes proyectados del polo del rotor tienen la misma anchura que los del estator. El número de polos del estator es diferente al de los polos del rotor, lo que proporciona la capacidad de autoarranque y la rotación bidireccional del motor.
La relación de los polos del rotor en términos de los polos del estator para un motor paso a paso trifásico se da como, Nr = Ns ± (Ns / q). Aquí Ns = 12, y q= 3, y por lo tanto Nr = 12 ± (12 / 3) = 16 u 8. A continuación se ilustra un rotor de construcción de 8 polos sin ninguna excitación.
Funcionamiento de Motor paso a paso de reluctancia variable
El motor paso a paso funciona según el principio de que el rotor se alinea en una posición particular con los dientes del polo de excitación en un circuito magnético en el que existe una trayectoria de reluctancia mínima. Siempre que se aplica energía al motor y excitando un devanado particular, produce su campo magnético y desarrolla sus propios polos magnéticos.
Debido al magnetismo residual en los polos del imán del rotor, hará que el rotor se mueva en una posición tal como para lograr la posición de mínima reluctancia y por lo tanto un conjunto de polos del rotor se alinea con el conjunto de polos energizados del estator. En esta posición, el eje del campo magnético del estator coincide con el eje que pasa a través de dos polos magnéticos cualesquiera del rotor.
Cuando el rotor se alinea con los polos del estator, tiene suficiente fuerza magnética para mantener el eje para que no se mueva a la siguiente posición, ya sea en el sentido de las agujas del reloj o en sentido contrario.
Considere el diagrama esquemático de un trifásico, 6 polos del estator y 4 dientes del rotor se muestra en la figura siguiente. Cuando la fase A-A’ es alimentada con corriente continua cerrando el interruptor -1, el devanado se convierte en un imán lo que hace que un diente se convierta en Norte y otro en Sur. Así que el eje magnético del estator se encuentra a lo largo de estos polos.
Debido a la fuerza de atracción, el polo norte de la bobina del estator atrae el diente del rotor más cercano de polaridad opuesta, es decir, el sur y el polo sur atrae el diente del rotor más cercano de polaridad opuesta, es decir, el norte. El rotor se ajusta entonces a su posición de mínima reluctancia donde el eje magnético del rotor coincide exactamente con el eje magnético del estator.
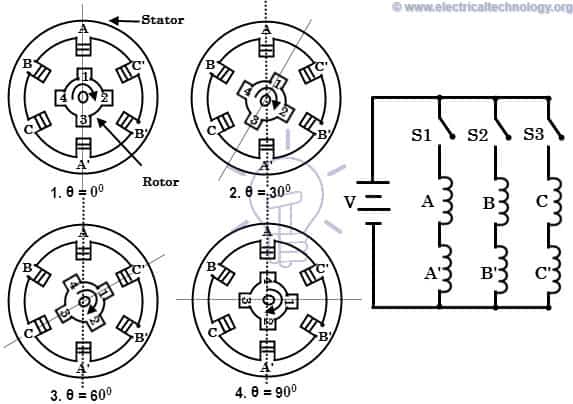
Cuando la fase B-B’ se energiza cerrando el interruptor -2 manteniendo la fase A-A’ desenergizada abriendo el interruptor-1, el devanado B-B’ producirá el flujo magnético y por lo tanto el eje magnético del estator se desplaza a lo largo de los polos así formados por él. Por lo tanto, el rotor se desplaza a la menor reluctancia con los dientes del estator magnetizados y gira a través de un ángulo de 30 grados en la dirección de las agujas del reloj.
Cuando el interruptor-3 se energiza después de abrir el interruptor-2, la fase C-C’ se energiza, los dientes del rotor se alinean con la nueva posición moviéndose a través de un ángulo adicional de 30 grados. De esta manera, el rotor se mueve en el sentido de las agujas del reloj o en sentido contrario excitando sucesivamente los devanados del estator en una secuencia particular. El ángulo de paso de este motor paso a paso trifásico de 4 polos se expresa como, 360/ (4 × 3) = 30 grados (ya que el ángulo de paso = 360 / Nr × q).
El ángulo de paso puede reducirse aún más mediante el aumento del número de polos en el estator y el rotor, en tal caso los motores se enrollan a menudo con devanados de fase adicionales. Esto también se puede lograr mediante la adopción de una construcción diferente de motores paso a paso, tales como la disposición multistage y el mecanismo de engranaje de reducción.
Motor paso a paso de imán permanente
El motor de diseño de imán permanente es quizás el más común entre varios tipos de motores paso a paso. Como su nombre indica, añade imanes permanentes a la construcción del motor. Este tipo de motores paso a paso también se conoce como motor de pila de latas o motor de lata. La principal ventaja de este motor es su bajo coste de fabricación. Este tipo de motor tiene 48-24 pasos por revolución.

Construcción Motor paso a paso de imanes permanentes
En este motor, el estator es de tipo multipolar y su construcción es similar a la del motor paso a paso de reluctancia variable como se ha comentado anteriormente. Consta de una periferia ranurada en la que se enrollan las bobinas del estator. Tiene polos proyectados en la estructura ranurada donde los devanados pueden ser bifásicos o trifásicos o tetrafásicos.
Los terminales finales de todos estos devanados se compran y se conectan a la excitación de CC a través de interruptores de estado sólido en el circuito de accionamiento.
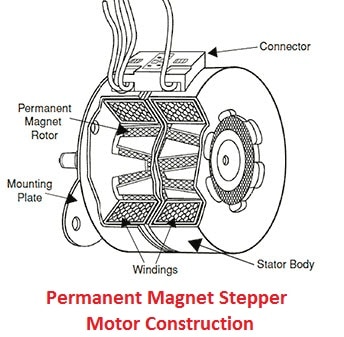
El rotor está formado por un material de imán permanente como la ferrita que puede tener forma de polo cilíndrico o saliente, pero normalmente es de tipo cilíndrico liso. El rotor está diseñado para tener un número par de polos magnéticos permanentes con polaridades Norte y Sur alternas.
Funcionamiento del motor paso a paso de imanes permanentes
El funcionamiento de este motor se basa en el principio de que los polos diferentes se atraen y los polos iguales se repelen. Cuando los devanados del estator se excitan con una alimentación de corriente continua, se produce un flujo magnético y se establecen los polos norte y sur. Debido a la fuerza de atracción y repulsión entre los polos del rotor de imán permanente y los polos del estator, el rotor comienza a moverse hasta la posición para la que se dan impulsos al estator.
Considere un motor paso a paso de 2 fases con dos polos de rotor magnético permanente como se muestra en la siguiente figura.
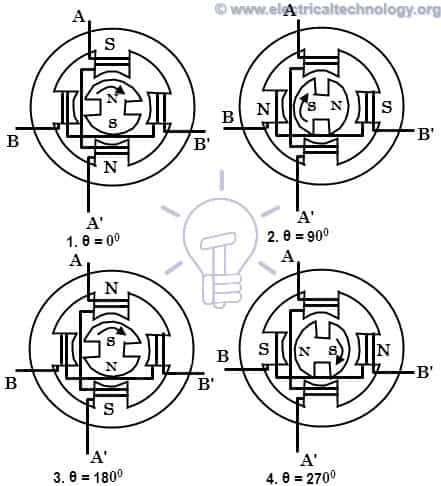
Cuando la fase A se energiza con un positivo con respecto a la A’, los devanados establecen polos Norte y Sur. Debido a la fuerza de atracción, los polos del rotor se alinean con los polos del estator de tal manera que el eje de los polos magnéticos del rotor se ajusta con el del estator como se muestra en la figura.
Cuando la excitación se cambia a la fase B y se desconecta la fase A, el rotor se ajusta además al eje magnético de la fase B, y por lo tanto gira 90 grados en sentido horario.
A continuación, si la fase A se excita con una corriente negativa respecto a A’, la formación de polos del estator hace que el rotor se mueva a través de otros 90 grados en el sentido de las agujas del reloj.
De la misma manera, si la fase B se excita con corriente negativa cerrando el interruptor de la fase A, el rotor gira a través de otros 90 grados en la misma dirección. A continuación, si se excita la fase A con corriente positiva, el rotor vuelve a la posición original dando una vuelta completa de 360 grados. Esto implica que, cada vez que se excita el estator, el rotor tiende a girar 90 grados en el sentido de las agujas del reloj.
El ángulo de paso de este motor de rotor de imanes permanentes de 2 fases y 2 polos se expresa como, 360/ (2 × 2) = 90 grados. El tamaño del paso puede reducirse energizando dos fases simultáneamente o una secuencia de modos ON de 1 fase y ON de 2 fases con una polaridad adecuada.
Motor paso a paso híbrido
Es el tipo de motor paso a paso más popular ya que proporciona un mejor rendimiento que el rotor de imanes permanentes en términos de resolución de pasos, par de retención y velocidad. Sin embargo, estos motores son más caros que los motores paso a paso PM. Combina las mejores características de los motores paso a paso de reluctancia variable y de imanes permanentes. Estos motores se utilizan en aplicaciones que requieren un ángulo de paso muy pequeño, como 1,5, 1,8 y 2,5 grados.

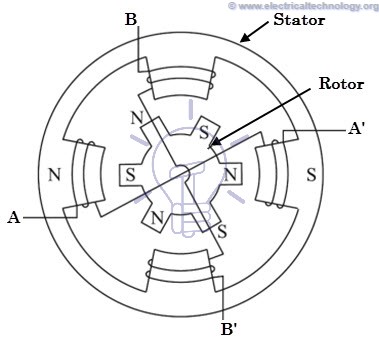
Construcción del motor paso a paso híbrido
El estator de este motor es el mismo que su homólogo de imanes permanentes o de reluctancia. Las bobinas del estator se enrollan en polos alternos. En este caso, las bobinas de diferentes fases se enrollan en cada polo, normalmente dos bobinas en un polo, lo que se conoce como conexión bifilar.
El rotor consiste en un imán permanente que se magnetiza en dirección axial para crear un par de polos magnéticos (polos N y S). Cada polo está cubierto con dientes uniformemente espaciados. Los dientes son de acero blando y de dos secciones, de los cuales en cada polo están desalineados entre sí por un paso de medio diente.
Funcionamiento del motor paso a paso híbrido
Este motor funciona de forma similar al motor paso a paso de imán permanente. La figura anterior muestra un motor paso a paso híbrido de 2 fases, 4 polos y 6 dientes. Cuando la fase A-A’ se excita con una alimentación de corriente continua, manteniendo B-B’ sin excitar, el rotor se alinea de forma que el polo sur del rotor se enfrenta al polo norte del estator mientras que el polo norte del rotor se enfrenta al polo sur del estator.
Ahora, si la fase B-B’ está excitada, manteniendo A-A’ desconectada de tal manera que el polo superior se convierte en norte y el inferior en sur, entonces el rotor se alineará a una nueva posición moviéndose en sentido contrario a las agujas del reloj. Si la fase B-B’ se excita de forma opuesta, de manera que el polo superior se convierta en sur y el inferior en norte, entonces el rotor girará en el sentido de las agujas del reloj.
Con una secuencia adecuada de pulsos al estator, el motor girará en la dirección deseada. Para cada excitación, el rotor se bloqueará en la nueva posición, e incluso si la excitación se retira el motor sigue manteniendo su condición de bloqueo debido a la excitación del imán permanente. El ángulo de paso de este motor de rotor de 2 fases, 4 polos y 6 dientes es de 360/ (2 × 6) = 30 grados. En la práctica, los motores híbridos se construyen con más número de polos del rotor para obtener una alta resolución angular.
Motores paso a paso unipolares y bipolares
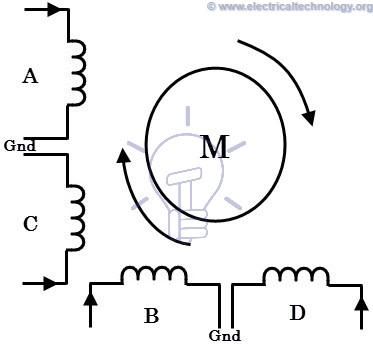
Los motores antes mencionados pueden ser unipolares o bipolares en función de la disposición de las bobinas. Un motor unipolar se emplea con dos devanados por fase y, por lo tanto, la dirección del flujo de corriente a través de estos devanados cambia la rotación del motor. En esta configuración, el flujo de corriente es a través de una dirección en una bobina y la dirección opuesta en otra bobina.
La figura siguiente muestra un motor paso a paso unipolar de 2 fases en el que las bobinas A y C son para una fase y B y D son para la otra fase. En cada fase cada bobina lleva la corriente en dirección opuesta a la de la otra bobina. Sólo una bobina llevará corriente a la vez en cada fase para lograr una dirección particular de rotación. Así que simplemente cambiando los terminales a cada bobina, se controla la dirección de rotación.
En el caso de un motor paso a paso bipolar, cada fase consiste en un solo bobinado en lugar de dos en el caso de uno unipolar. En este caso, la dirección de rotación se controla invirtiendo la corriente a través de los devanados. Por lo tanto, requiere un complejo circuito de accionamiento para la inversión de la corriente.

Modos de paso de un motor paso a paso
Una acción típica de paso hace que el motor pase por una secuencia de posiciones de equilibrio en respuesta a los pulsos de corriente que se le dan. Es posible variar la acción de paso de diferentes maneras simplemente cambiando la secuencia a través de la cual se energizan los devanados del estator. A continuación se describen los modos de funcionamiento o conducción más comunes de los motores paso a paso.
- Paso de onda
- Paso completo
- Medio paso
- Micropaso

.
Modo de paso de onda
El modo de paso de onda es el más simple de todos los demás modos en el que sólo se energiza un devanado en un momento dado. Cada bobina de la fase se conecta a la alimentación alternativamente. La tabla siguiente muestra el orden en que se energizan las bobinas en un motor paso a paso de 4 fases.
En este modo el motor da el máximo ángulo de paso en comparación con todos los demás modos. Es el modo más simple y más comúnmente utilizado para el paso; sin embargo, el par producido es menor ya que utiliza una parte del devanado total en un momento dado.
Modo de paso completo
En este accionamiento o modo, dos fases del estator se energizan simultáneamente en un momento dado. Cuando dos fases se energizan juntas, el rotor experimentará el par de ambas fases y llega a la posición de equilibrio, que se intercalará entre dos posiciones de paso de onda adyacentes o excitaciones monofásicas. Por lo tanto, este paso proporciona un mejor par de retención que el paso de onda. La siguiente tabla muestra el accionamiento de paso completo para un motor paso a paso de 4 fases.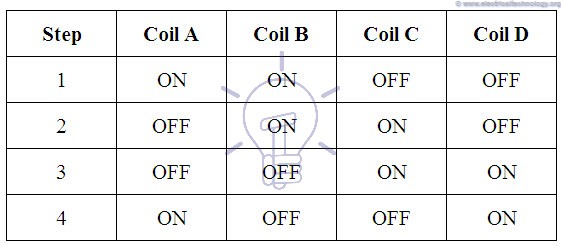
Modo de medio paso
Es la combinación de los modos de onda y paso completo. En él se realizan alternativamente excitaciones monofásicas y bifásicas, es decir, monofásicas ON, bifásicas ON, etc. El ángulo de paso en este modo se convierte en la mitad del ángulo de paso completo. Este modo de accionamiento tiene el par y la estabilidad más altos en comparación con todos los demás modos. La tabla que contiene la secuencia de pulsación de fase para un motor de 4 fases en medio paso se da a continuación.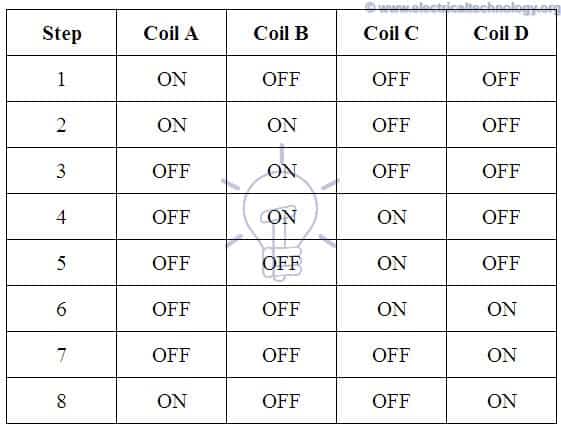
Modo Microstepping
En este modo, cada paso del motor se subdivide en varios pasos pequeños, incluso cientos de posiciones fijas, por lo que se obtiene una mayor resolución de posicionamiento. En este, las corrientes a través de los devanados se varían continuamente para obtener pasos muy pequeños. En esto, dos fases son excitadas simultáneamente, pero con las corrientes desiguales en cada fase.
Por ejemplo, la corriente a través de la fase -1 se mantiene constante mientras que la corriente a través de la fase-2 se incrementa en pasos hasta el valor máximo de la corriente, ya sea negativa o positiva. A continuación, la corriente en la fase-1 se disminuye o aumenta en pasos hasta llegar a cero. Así, el motor producirá un tamaño de paso pequeño.
Todos estos modos de paso pueden ser obtenidos por cada tipo de motor paso a paso discutido anteriormente. Sin embargo, la dirección de la corriente en cada devanado durante estos pasos puede variar dependiendo del tipo de motor y de si es unipolar o bipolar.
- Cálculo del tamaño del cable del poste relacionado para motores LT & HT
Ventajas del motor paso a paso
- En posición de reposo, el motor tiene un par completo. No importa si no hay ningún momento o si cambia de posición.
- Tiene una buena respuesta a la posición de arranque, parada e inversión.
- Como no hay escobillas de contacto en el motor paso a paso, es fiable y la esperanza de vida depende de los rodamientos del motor.
- El ángulo de rotación del motor es directamente proporcional a las señales de entrada.
- Es sencillo y menos costoso de controlar ya que el motor proporciona un control de bucle abierto al responder a las señales de entrada digitales.
- La velocidad del motor es directamente proporcional a la frecuencia de los pulsos de entrada, de esta manera se puede conseguir un amplio rango de velocidad de rotación.
- Cuando la carga está acoplada al eje, todavía es posible realizar la rotación sincrónica con baja velocidad.
- El posicionamiento exacto y la repetibilidad del movimiento es buena ya que tiene una precisión de 3-5% de un paso donde el error no es acumulativo de un paso a otro.
- Los motores paso a paso son más seguros y de bajo coste (en comparación con los servomotores), teniendo un alto par a bajas velocidades, alta fiabilidad con una construcción simple que funciona en cualquier entorno.
- Los motores paso a paso tienen una baja eficiencia.
- Tiene una baja precisión.
- Su par disminuye muy rápidamente con la velocidad.
- Como el motor paso a paso funciona en control de bucle abierto, no hay retroalimentación para indicar posibles pasos perdidos.
- Tiene una baja relación de par a inercia significa que no puede acelerar la carga muy rápidamente.
- Son ruidosos.
- Los motores paso a paso se utilizan en equipos de producción automatizados y medidores de automoción y máquinas industriales como las de envasado, etiquetado, llenado y corte, etc.
- Se utiliza ampliamente en dispositivos de seguridad como cámaras de vigilancia de &.
- En la industria médica, los motores paso a paso se utilizan ampliamente en muestras, fotografía dental digital, respiradores, bombas de fluidos, maquinaria de análisis de sangre y escáneres médicos, etc.
- Se utilizan en la electrónica de consumo en escáneres de imágenes, máquinas fotocopiadoras e impresoras y en la cámara digital para las funciones y posiciones automáticas de zoom y enfoque.
- Los motores paso a paso también se utilizan en ascensores, cintas transportadoras y desviadores de carril.
- Motores DC – Construcción, Funcionamiento & Clasificación de los accionamientos eléctricos de CC
- Potencia de motores trifásicos & Diagramas de cableado de control
- Biblioteca de motores eléctricos (CA & DC )
Desventajas de los motores paso a paso
Aplicaciones de los motores paso a paso
También puedes leer:
.