Types of Stepper Motors – Their Construction, Working Operation and Applications
Table of Contents
Wynalezienie dedykowanych kart sterowników silników krokowych oraz innych cyfrowych technologii sterowania umożliwiających podłączenie silnika krokowego do systemów opartych na komputerach PC jest przyczyną powszechnej akceptacji silników krokowych w ostatnich czasach. Silniki krokowe stają się idealnym wyborem dla systemów automatyki, które wymagają precyzyjnej kontroli prędkości lub precyzyjnego pozycjonowania lub obu.
Jak wiemy, że wiele przemysłowych silników elektrycznych są używane z zamkniętą pętlą sprzężenia zwrotnego kontroli w celu osiągnięcia precyzyjnego pozycjonowania lub precyzyjnej kontroli prędkości, z drugiej strony, silnik krokowy w stanie pracować na otwartej pętli sterownika. To z kolei zmniejsza całkowity koszt systemu i upraszcza projekt maszyny w porównaniu do sterowania serwomechanizmem. Omówmy pokrótce silnik krokowy i jego typy.
- Related Post: Serwomotor – Rodzaje, Budowa, Działanie, & Zastosowania
Co to jest silnik krokowy?
Silnik krokowy jest bezszczotkowym urządzeniem elektromechanicznym, które przekształca ciąg impulsów elektrycznych przyłożonych do jego uzwojenia wzbudzającego w precyzyjnie określony krok po kroku mechaniczny obrót wału. Wał silnika obraca się o stały kąt dla każdego dyskretnego impulsu. Ten obrót może być liniowy lub kątowy, dostaje jeden krok ruchu dla pojedynczego impulsu wejściowego.
Gdy pociąg impulsów jest stosowany, dostaje obrócony przez pewien kąt. Kąt, o który obraca się wał silnika krokowego dla każdego impulsu jest określany jako kąt kroku, który jest ogólnie wyrażony w stopniach.

Liczba impulsów wejściowych podawanych do silnika decyduje o kącie kroku, a zatem pozycja wału silnika jest kontrolowana poprzez sterowanie liczbą impulsów. Ta unikalna cecha sprawia, że silnik krokowy dobrze nadaje się do otwartego systemu sterowania, w którym precyzyjna pozycja wału jest utrzymywana z dokładną liczbą impulsów bez użycia czujnika sprzężenia zwrotnego.
Jeśli kąt kroku jest mniejszy, tym większa będzie liczba kroków na obroty i wyższa będzie dokładność uzyskanej pozycji. Kąty stopni mogą być tak duże jak 90 stopni i tak małe jak 0,72 stopnia, jednak powszechnie stosowane kąty stopni to 1,8 stopnia, 2,5 stopnia, 7,5 stopnia i 15 stopni.
Kierunek obrotu wału zależy od sekwencji impulsów podawanych na stojan. Prędkość obrotowa wału lub średnia prędkość obrotowa silnika jest wprost proporcjonalna do częstotliwości (szybkości impulsów wejściowych) impulsów wejściowych podawanych na uzwojenia wzbudzenia. Dlatego też, jeśli częstotliwość jest niska, silnik krokowy obraca się krokowo, a dla wysokiej częstotliwości obraca się w sposób ciągły jak silnik prądu stałego z powodu bezwładności.
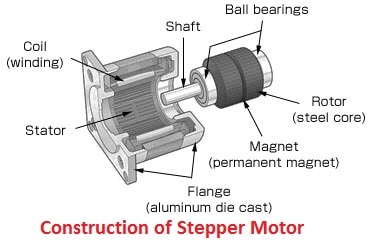
Jak wszystkie silniki elektryczne, posiada on stojan i wirnik. Wirnik jest częścią ruchomą, która nie posiada uzwojeń, szczotek i komutatora. Zazwyczaj są to wirniki o zmiennej reluktancji lub z magnesami trwałymi. Stojan jest często zbudowany z uzwojeń wielobiegunowych i wielofazowych, zwykle z uzwojeń trzy- lub czterofazowych, nawiniętych na wymaganą liczbę biegunów, o której decyduje pożądane przesunięcie kątowe na impuls wejściowy.
W przeciwieństwie do innych silników, działa on na zaprogramowane dyskretne impulsy sterujące, które są stosowane do uzwojeń stojana za pośrednictwem napędu elektronicznego. Obrót następuje dzięki oddziaływaniu magnetycznemu pomiędzy biegunami kolejno zasilanego uzwojenia stojana a biegunami wirnika.
Na dzisiejszym rynku dostępnych jest kilka typów silników krokowych w szerokim zakresie rozmiarów, liczby kroków, konstrukcji, okablowania, przekładni i innych właściwości elektrycznych. Jak te silniki są w stanie działać w dyskretny charakter, są one dobrze nadaje się do interfejsu z cyfrowych urządzeń sterujących, takich jak komputery.
Dla precyzyjnej kontroli prędkości, obrotu, kierunku i pozycji kątowej, są one szczególnie interesujące w systemach kontroli procesów przemysłowych, maszyn CNC, robotyki, produkcji systemów automatyki i oprzyrządowania.
- Related Post: Brushless DC Motor – Construction, Working Principle & Zastosowania
Rodzaje silników krokowych
Istnieją trzy podstawowe kategorie silników krokowych, a mianowicie
- Motor krokowy z magnesem trwałym
- Motor krokowy o zmiennej reluktancji
- Motor krokowy hybrydowy
W tych wszystkich silnikach uzwojenia wzbudzenia są stosowane w stojanie, gdzie liczba uzwojeń odnosi się do liczby faz.
Napięcie stałe jest stosowane jako wzbudzenie do cewek uzwojenia, a każdy zacisk uzwojenia jest podłączony do źródła poprzez przełącznik półprzewodnikowy. W zależności od typu silnika krokowego, jego konstrukcja wirnika jest skonstruowana tak, jak wirnik ze stali miękkiej z biegunami właściwymi, cylindryczny wirnik z magnesem trwałym i magnes stały z zębami ze stali miękkiej. Omówmy te typy w szczegółach.

- Możesz również przeczytać: Połączenie silnika trójfazowego Gwiazda/trójkąt (Y-Δ) Rewers / Forward z zasilaniem czasowym & Schemat sterowania
Silnik krokowy o zmiennej reluktancji
Jest to podstawowy typ silnika krokowego, który istnieje od dawna i zapewnia najłatwiejszy sposób zrozumienia zasady działania z konstrukcyjnego punktu widzenia. Jak sama nazwa wskazuje, położenie kątowe wirnika zależy od reluktancji obwodu magnetycznego utworzonego pomiędzy biegunami (zębami) stojana a zębami wirnika.

Budowa silnika krokowego o zmiennej reluktancji
Składa się on z nawiniętego stojana i wielozębnego wirnika z miękkiego żelaza.zębatego wirnika. Stojan posiada stos laminatów ze stali krzemowej, na których nawinięte jest uzwojenie stojana. Zazwyczaj jest ono nawinięte dla trzech faz, które są rozdzielone pomiędzy pary biegunów.
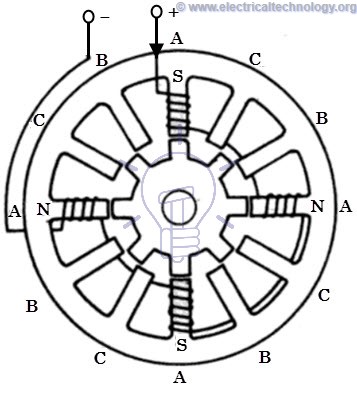
Liczba biegunów na stojanie utworzona w ten sposób jest równa parzystej wielokrotności liczby faz, dla których uzwojenia są nawinięte na stojanie. Na poniższym rysunku stojan ma 12 jednakowo rozmieszczonych wystających biegunów, gdzie każdy biegun jest nawinięty cewką wzbudzającą. Te trzy fazy są zasilane ze źródła prądu stałego za pomocą przełączników półprzewodnikowych.
Wirnik nie posiada uzwojeń i jest typu salient pole wykonany w całości ze stalowych laminatów szczelinowych. Wystające zęby biegunów wirnika mają taką samą szerokość jak zęby stojana. Liczba biegunów na stojanie różni się od liczby biegunów wirnika, co zapewnia zdolność do samoczynnego rozruchu i dwukierunkowego obrotu silnika.
Zależność biegunów wirnika w odniesieniu do biegunów stojana dla trójfazowego silnika krokowego jest określona jako, Nr = Ns ± (Ns / q). Tutaj Ns = 12, a q= 3, a zatem Nr = 12 ± (12 / 3) = 16 lub 8. Poniżej przedstawiono wirnik o konstrukcji 8-biegunowej bez żadnego wzbudzenia.
Praca silnika krokowego o zmiennym współczynniku indukcyjności Silnik krokowy o zmiennej reluktancji
Silnik krokowy działa na zasadzie, że wirnik ustawia się w określonej pozycji z zębami bieguna wzbudzenia w obwodzie magnetycznym, w którym istnieje minimalna ścieżka reluktancji. Kiedykolwiek moc jest stosowana do silnika i poprzez wzbudzanie konkretnego uzwojenia, wytwarza on swoje pole magnetyczne i rozwija swoje własne bieguny magnetyczne.
Dzięki magnetyzmowi szczątkowemu w biegunach magnesu wirnika, spowoduje to ruch wirnika w takiej pozycji, aby osiągnąć pozycję minimalnej reluktancji i tym samym jeden zestaw biegunów wirnika wyrównuje się z zasilanym zestawem biegunów stojana. W tym położeniu oś pola magnetycznego stojana pokrywa się z osią przechodzącą przez dwa dowolne bieguny magnetyczne wirnika.
Gdy wirnik ustawi się w jednej linii z biegunami stojana, ma wystarczającą siłę magnetyczną, aby utrzymać wał przed przejściem do następnej pozycji, w kierunku zgodnym lub przeciwnym do ruchu wskazówek zegara.
Rozważmy schemat 3-fazowego urządzenia o 6 biegunach stojana i 4 zębach wirnika, pokazany na rysunku poniżej. Kiedy faza A-A' jest zasilana prądem stałym poprzez zamknięcie przełącznika -1, uzwojenie staje się magnesem, co powoduje, że jeden ząbek staje się północny, a drugi południowy. W związku z tym oś magnetyczna stojana leży wzdłuż tych biegunów.
Dzięki sile przyciągania, cewka stojana biegun północny przyciąga najbliższy ząb wirnika o przeciwnej biegunowości, czyli południowy, a biegun południowy przyciąga najbliższy ząb wirnika o przeciwnej biegunowości, czyli północny. Następnie wirnik ustawia się w pozycji minimalnej reluktancji, w której oś magnetyczna wirnika dokładnie pokrywa się z osią magnetyczną stojana.
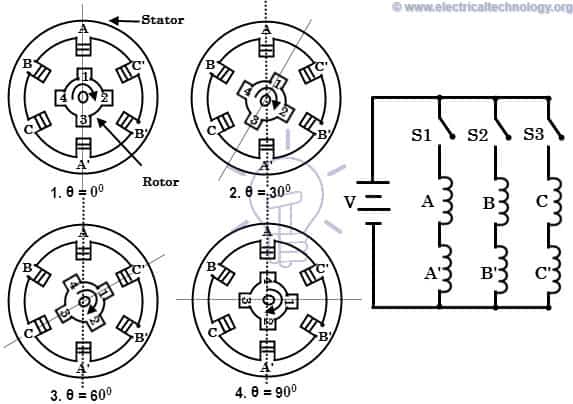
Gdy faza B-B' zostanie wzbudzona przez zamknięcie przełącznika -2, a faza A-A' pozostanie niewzbudzona przez otwarcie przełącznika-1, uzwojenie B-B' wytworzy strumień magnetyczny i w związku z tym oś magnetyczna stojana przesunie się wzdłuż utworzonych przez nią biegunów. W ten sposób wirnik przesuwa się w kierunku najmniejszej reluktancji z namagnesowanymi zębami stojana i obraca się o kąt 30 stopni w kierunku zgodnym z ruchem wskazówek zegara.
Gdy po otwarciu przełącznika-2 włącza się przełącznik-3, faza C-C' zostaje włączona, zęby wirnika ustawiają się w nowej pozycji, przesuwając się o dodatkowy kąt 30 stopni. W ten sposób wirnik porusza się w kierunku zgodnym lub przeciwnym do ruchu wskazówek zegara poprzez sukcesywne wzbudzanie uzwojeń stojana w określonej sekwencji. Kąt kroku tego 3-fazowego, 4-biegunowego silnika krokowego z zębami wirnika jest wyrażony jako, 360/ (4 × 3) = 30 stopni (jako kąt kroku = 360 / Nr × q).
Kąt kroku może być dalej zmniejszony poprzez zwiększenie liczby biegunów na stojanie i wirniku, w takim przypadku silniki są często nawijane z dodatkowymi uzwojeniami fazowymi. Można to również osiągnąć poprzez przyjęcie innej konstrukcji silników krokowych, takich jak układ multistack i mechanizm przekładni redukcyjnej.
- Możesz również przeczytać: Trójfazowe podłączenie silnika STAR/DELTA bez zasilania zegarowego & Schematy sterowania
Silnik krokowy z magnesem trwałym
Silnik o konstrukcji z magnesem trwałym jest chyba najbardziej rozpowszechniony wśród kilku typów silników krokowych. Jak sama nazwa wskazuje, dodaje magnesy trwałe do konstrukcji silnika. Ten typ silników krokowych jest również określane jako can-stack silnika lub tin-can silnika. Główną zaletą tego silnika jest jego niski koszt produkcji. Ten typ silnika ma 48-24 kroków na obrót.

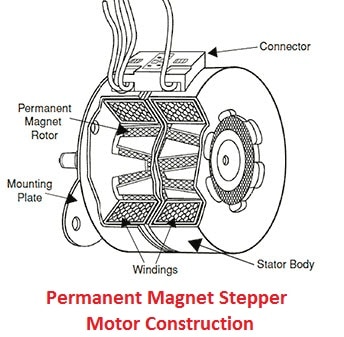
Budowa Silnik krokowy z magnesem trwałym
W tym silniku, stojan jest wielobiegunowy, a jego konstrukcja jest podobna do omówionego powyżej silnika krokowego o zmiennej reluktancji. Składa się on ze szczelinowego obwodu, na którym nawinięte są cewki stojana. Posiada on zaprojektowane bieguny na strukturze szczelinowej, gdzie uzwojenia mogą być dwu-, trzy- lub czterofazowe.
Zaciski końcowe wszystkich tych uzwojeń są wykupione i podłączone do wzbudzenia prądu stałego poprzez przełączniki półprzewodnikowe w obwodzie napędowym.
Wirnik zbudowany jest z materiału magnesu trwałego, takiego jak ferryt, który może mieć kształt cylindryczny lub biegunów obojętnych, ale zwykle jest to gładki typ cylindryczny. Wirnik zaprojektowany jest tak, aby posiadał parzystą liczbę biegunów magnetycznych o naprzemiennej polaryzacji północnej i południowej.
Praca silnika krokowego z magnesem trwałym
Praca tego silnika opiera się na zasadzie, że bieguny niepodobne przyciągają się, a bieguny podobne odpychają się. Kiedy uzwojenia stojana są wzbudzane prądem stałym, wytwarzają strumień magnetyczny i ustanawiają bieguny północny i południowy. Ze względu na siłę przyciągania i odpychania pomiędzy biegunami wirnika z magnesem trwałym i biegunami stojana, wirnik zaczyna poruszać się do pozycji, dla której impulsy są podawane do stojana.
Rozważmy 2-fazowy silnik krokowy z dwoma biegunami wirnika z magnesem trwałym, jak pokazano na poniższym rysunku.
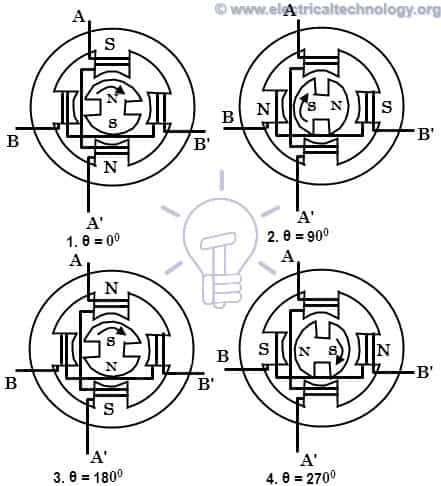
Gdy faza A jest zasilana prądem dodatnim w stosunku do A', uzwojenia tworzą bieguny północny i południowy. Z powodu siły przyciągania bieguny wirnika ustawiają się w jednej linii z biegunami stojana, tak że oś biegunów magnetycznych wirnika dopasowuje się do osi biegunów stojana, jak pokazano na rysunku.
Gdy wzbudzenie jest przełączane na fazę B i wyłączana jest faza A, wirnik dalej dopasowuje się do osi magnetycznej fazy B i w ten sposób obraca się o 90 stopni w kierunku zgodnym z ruchem wskazówek zegara.
Następnie, jeżeli faza A jest wzbudzana prądem ujemnym w stosunku do A', to tworzenie się biegunów stojana powoduje ruch wirnika o kolejne 90 stopni w kierunku zgodnym z ruchem wskazówek zegara.
W ten sam sposób, jeżeli faza B jest wzbudzana prądem ujemnym przez zamknięcie przełącznika fazy A, to wirnik obraca się o kolejne 90 stopni w tym samym kierunku. Następnie, jeśli faza A zostanie wzbudzona prądem dodatnim, wirnik powróci do pozycji wyjściowej, wykonując pełny obrót o 360 stopni. Oznacza to, że za każdym razem, gdy stojan jest wzbudzony, wirnik ma tendencję do obracania się o 90 stopni w kierunku zgodnym z ruchem wskazówek zegara.
Kąt kroku tego 2-fazowego, 2-biegunowego silnika z wirnikiem z magnesem trwałym wyraża się jako, 360/ (2 × 2) = 90 stopni. Wielkość kroku można zmniejszyć poprzez jednoczesne zasilanie dwóch faz lub sekwencję trybów 1-fazowego ON i 2-fazowego ON z zachowaniem właściwej polaryzacji.
- Możesz również przeczytać: Terminy i definicje związane ze sterowaniem i ochroną silnika
Hybrydowy silnik krokowy
Jest to najpopularniejszy typ silnika krokowego, ponieważ zapewnia lepsze osiągi niż wirnik z magnesem trwałym pod względem rozdzielczości kroku, momentu trzymającego i prędkości. Jednak te silniki są droższe niż PM silników krokowych. Łączy w sobie najlepsze cechy zarówno zmiennej reluktancji i magnesów trwałych silników krokowych. Silniki te są wykorzystywane w aplikacjach, które wymagają bardzo mały kąt steppingu, takich jak 1,5, 1,8 i 2,5 stopni.

Budowa hybrydowego silnika krokowego
Stojan tego silnika jest taki sam jak jego odpowiednik z magnesem trwałym lub reluktancyjny. Cewki stojana są nawinięte na przemiennych biegunach. W tym przypadku, cewki różnych faz są nawinięte na każdym biegunie, zwykle dwie cewki na biegunie, co jest określane jako połączenie bifilarne.
Wirnik składa się z magnesu stałego, który jest namagnesowany w kierunku osiowym, tworząc parę biegunów magnetycznych (bieguny N i S). Każdy z biegunów pokryty jest równomiernie rozmieszczonymi zębami. Zęby są wykonane z miękkiej stali i dwóch sekcji, z których na każdym biegunie są przesunięte względem siebie o pół zęba.
- Related Post Why Electric Motors rated in kW instead of kVA?
Working of Hybrid Stepper Motor
Ten silnik działa podobnie do silnika krokowego z magnesem trwałym. Powyższy rysunek przedstawia 2-fazowy, 4-polowy, 6-zębowy hybrydowy silnik krokowy z wirnikiem. Gdy faza A-A' jest wzbudzana prądem stałym, a faza B-B' nie jest wzbudzana, wirnik ustawia się w taki sposób, że biegun południowy wirnika skierowany jest w stronę bieguna północnego stojana, podczas gdy biegun północny wirnika skierowany jest w stronę bieguna południowego stojana.
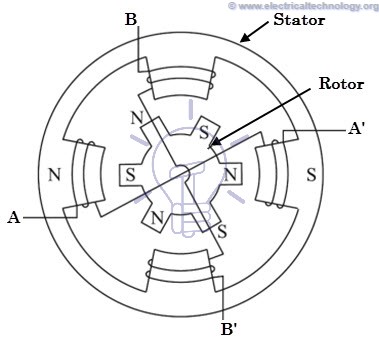
Teraz, jeżeli faza B-B' jest wzbudzona, utrzymując A-A' wyłączone w taki sposób, że górny biegun staje się północny, a dolny południowy, wtedy wirnik ustawi się w nowej pozycji poruszając się w kierunku przeciwnym do ruchu wskazówek zegara. Jeśli faza B-B' zostanie wzbudzona przeciwnie, w taki sposób, że górny biegun stanie się południowy, a dolny północny, wtedy wirnik obróci się w kierunku zgodnym z ruchem wskazówek zegara.
Poprzez odpowiednią sekwencję impulsów do stojana, silnik będzie obracał się w pożądanym kierunku. Dla każdego wzbudzenia, wirnik zostanie zablokowany w nowej pozycji, a nawet jeśli wzbudzenie zostanie usunięte, silnik nadal utrzymuje stan zablokowania dzięki wzbudzeniu magnesu stałego. Kąt kroku tego 2-fazowego, 4-biegunowego, 6-zębowego silnika z wirnikiem wynosi 360/ (2 × 6) = 30 stopni. W praktyce, silniki hybrydowe są konstruowane z większą liczbą biegunów wirnika w celu uzyskania wysokiej rozdzielczości kątowej.
- Related Post: What is Motor Efficiency & Jak ją poprawić?
Unipolarne i bipolarne silniki krokowe
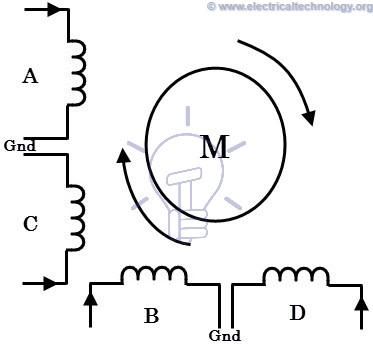
Powyżej omówione silniki mogą być unipolarne lub bipolarne w oparciu o układ uzwojenia cewki. Silnik unipolarny posiada dwa uzwojenia na fazę i w związku z tym kierunek przepływu prądu przez te uzwojenia zmienia kierunek obrotu silnika. W tej konfiguracji, przepływ prądu odbywa się w jednym kierunku w jednej cewce i przeciwnym kierunku w innej cewce.
Na rysunku poniżej przedstawiono 2-fazowy unipolarny silnik krokowy, w którym cewki A i C są dla jednej fazy i B i D są dla drugiej fazy. W każdej fazie każda cewka przewodzi prąd w kierunku przeciwnym do tego, który przewodzi inna cewka. Tylko jedna cewka będzie nosić prąd na raz w każdej fazie do osiągnięcia określonego kierunku obrotów. Tak więc przełączając zaciski każdej cewki można kontrolować kierunek obrotów.
W przypadku bipolarnego silnika krokowego, każda faza składa się z jednego uzwojenia, a nie dwóch w przypadku unipolarnego. W tym przypadku kierunek obrotu jest kontrolowany poprzez odwrócenie prądu płynącego przez uzwojenia. Stąd, wymaga on złożonego obwodu napędowego dla odwrócenia prądu.

- Możesz również przeczytać: Co to jest solenoid i pole magnetyczne solenoidu
Tryby krokowe silnika krokowego
Typowe działanie krokowe powoduje, że silnik przechodzi przez sekwencję położeń równowagi w odpowiedzi na impulsy prądowe do niego podawane. Możliwe jest zróżnicowanie akcji krokowej na różne sposoby poprzez zmianę kolejności, w jakiej uzwojenia stojana są zasilane. Poniżej przedstawiono najczęstsze tryby pracy lub jazdy silników krokowych.
- Krok falowy
- Pełny krok
- Pół kroku
- Mikrokroskop

Tryb kroku falowego
Tryb kroku falowego jest najprostszym ze wszystkich trybów, w którym tylko jedno uzwojenie jest zasilane w danym czasie. Każda cewka fazy jest podłączona do zasilania naprzemiennie. Poniższa tabela pokazuje kolejność, przez które cewki są zasilane w 4-fazowy silnik krokowy.
W tym trybie silnik daje maksymalny kąt kroku w porównaniu do wszystkich innych trybów. Jest to najprostszy i najczęściej używany tryb krokowy; jednakże wytwarzany moment obrotowy jest mniejszy, ponieważ wykorzystuje on część całkowitego uzwojenia w danym czasie.
Tryb pełnego kroku
W tym napędzie lub trybie, dwie fazy stojana są wzbudzane jednocześnie w danym czasie. Gdy dwie fazy są wzbudzane razem, wirnik doświadcza momentu obrotowego z obu faz i dochodzi do pozycji równowagi, która jest przeplatana pomiędzy dwoma sąsiednimi pozycjami kroku falowego lub wzbudzeniami 1-fazowymi. Tak więc ten krok zapewnia lepszy moment trzymający niż krok falowy. Poniższa tabela pokazuje pełny napęd krok dla 4-fazowego silnika krokowego.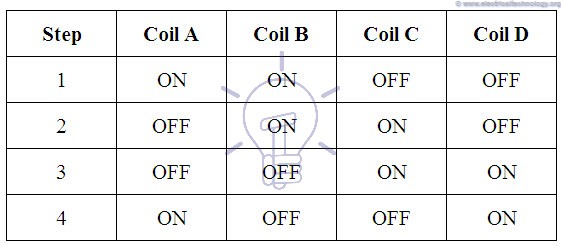
Half Step Mode
Jest to połączenie zarówno fali i pełne tryby krok. W tym trybie, wzbudzenia jednofazowe i dwufazowe są realizowane naprzemiennie, tzn. jedna faza ON, dwie fazy ON, itd. Kąt kroku w tym trybie jest równy połowie kąta pełnego kroku. Ten tryb pracy charakteryzuje się najwyższym momentem obrotowym i stabilnością w porównaniu do wszystkich innych trybów. Tabela zawierająca sekwencję pulsowania faz dla silnika 4-fazowego w trybie półkrokowym jest podana poniżej.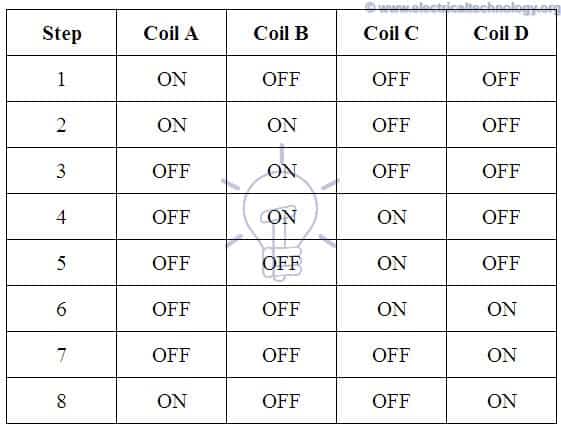
Tryb mikrokrokowy
W tym trybie każdy krok silnika jest dzielony na kilka małych kroków, nawet setki stałych pozycji, dzięki czemu uzyskuje się większą rozdzielczość pozycjonowania. W tym trybie, prądy przez uzwojenia są stale zmieniane w celu uzyskania bardzo małych kroków. W tym, dwie fazy są wzbudzane jednocześnie, ale z nierównymi prądami w każdej fazie.
Na przykład, prąd przez fazę -1 jest utrzymywany na stałym poziomie, podczas gdy prąd przez fazę-2 jest zwiększany w krokach, aż do maksymalnej wartości prądu, czy jest to ujemne lub dodatnie. Prąd w fazie-1 jest następnie zmniejszany lub zwiększany skokowo aż do zera. Tak więc, silnik będzie produkować mały rozmiar kroku.
Wszystkie te tryby krokowe mogą być uzyskane przez każdy typ silnika krokowego omówione powyżej. Jednakże kierunek prądu w każdym uzwojeniu podczas tych kroków może być różny w zależności od typu silnika i albo jest unipolarny lub bipolarny.
- Powiązany post Obliczanie wielkości kabla dla LT & HT Silniki
Zalety silnika krokowego
- W pozycji spoczynkowej, silnik ma pełny moment obrotowy. Nie ma znaczenia czy nie ma momentu czy zmienia się pozycja.
- Ma dobrą odpowiedź na rozpoczęcie, zatrzymanie i odwrócenie pozycji.
- Jako że nie ma szczotek kontaktowych w silniku krokowym, jest niezawodny, a oczekiwana długość życia zależy od łożysk silnika.
- Kąt obrotu silnika jest wprost proporcjonalny do sygnałów wejściowych.
- Jest prosty i mniej kosztowny w kontroli, ponieważ silnik zapewnia kontrolę w pętli otwartej, gdy reaguje na cyfrowe sygnały wejściowe.
- Prędkość silnika jest wprost proporcjonalna do częstotliwości impulsów wejściowych, w ten sposób można osiągnąć szeroki zakres prędkości obrotowej.
- Gdy obciążenie jest sprzężone z wałem, nadal możliwe jest realizowanie synchronicznego obrotu z niską prędkością.
- Dokładne pozycjonowanie i powtarzalność ruchu jest dobra, ponieważ ma 3-5% dokładności kroku, gdzie błąd nie jest kumulatywny z jednego kroku do drugiego.
- Silniki krokowe są bezpieczniejsze i niskie koszty (w porównaniu do serwomotorów), posiadające wysoki moment obrotowy przy niskich prędkościach, wysoka niezawodność z prostej konstrukcji, która działa w każdym środowisku.
Wady silników krokowych
- Silniki krokowe o niskiej wydajności.
- Ma niską dokładność.
- Jego moment obrotowy spada bardzo szybko z prędkością.
- Jako silnik krokowy działa w otwartej pętli sterowania, nie ma sprzężenia zwrotnego, aby wskazać potencjalne pominięte kroki.
- Ma niski stosunek momentu obrotowego do bezwładności oznacza, że nie może przyspieszyć obciążenie bardzo szybko.
- Są one głośne.
Zastosowania silników krokowych
- Silniki krokowe są używane w zautomatyzowanych urządzeniach produkcyjnych i miernikach samochodowych oraz maszynach przemysłowych, takich jak pakowanie, etykietowanie, napełnianie i cięcie itp.
- Jest on szeroko stosowany w urządzeniach bezpieczeństwa, takich jak zabezpieczenia & kamery nadzoru.
- W przemyśle medycznym, silniki krokowe są szeroko stosowane w próbkach, cyfrowej fotografii dentystycznej, respiratory, pompy płynów, maszyny do analizy krwi i skanerów medycznych itp.
- Są one używane w elektronice użytkowej w skanerach obrazu, kopiarki fotograficznej i maszyn drukarskich oraz w aparacie cyfrowym do automatycznego zoomu i funkcji ostrości i pozycji.
- Silniki krokowe również używane w windach, przenośniki taśmowe i rozdzielacze pasa ruchu.
Możesz również przeczytać:
- Napędy DC – Konstrukcja, Praca & Klasyfikacja elektrycznych napędów prądu stałego
- Moc silników trójfazowych & Schematy połączeń sterujących
- Biblioteka silników elektrycznych (AC & DC )