Często pojawia się pytanie: „Jaka jest normalna lub standardowa postać algorytmu PID (proporcjonalno-całkująco-różniczkującego)?”
Odpowiedź jest zarówno prosta jak i złożona. Zanim zajmiemy się odpowiedzią, rozważmy pokazane poniżej ekrany (kliknij, aby zobaczyć w większym rozmiarze przykład 1 lub przykład 2):
 |
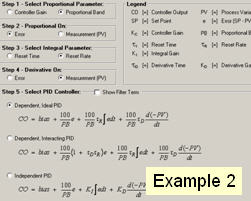 |
Jak widać na screenach:
▪ Istnieją trzy popularne postacie algorytmu PID (patrz krok 5 w dużych widokach obrazu).ażdy z trzech algorytmów ma parametry dostrajania i zmienne algorytmu, które mogą być rzutowane na różne sposoby (patrz kroki 1-4 na dużych obrazkach).
Więc Twój sprzedawca może używać jednej z kilkudziesięciu możliwych postaci algorytmu. A jeśli dodasz termin filtrujący do swojego kontrolera, liczba możliwości znacznie wzrośnie.
Prosta odpowiedź
Każdy z algorytmów może zapewnić taką samą wydajność jak każdy inny. Nie ma żadnej korzyści kontrolnej z wyboru jednej formy nad drugą. Wszystkie są standardowe lub normalne w tym sensie.
Jeśli rozważasz zakup, wybierz sprzedawcę, który najlepiej zaspokaja Twoje potrzeby i nie rozwodź się nad specyfiką algorytmu. Niektóre rzeczy do rozważenia obejmują:
▪ zgodność z istniejącymi kontrolerami i związanym z nimi sprzętem i oprogramowaniem
▪ koszt
▪ łatwość instalacji i konserwacji
▪ niezawodność
▪ środowisko pracy (czy jest czyste? chłodne? suche?)
A More Complete Answer
Większość różnych form algorytmów kontrolera można znaleźć w jednym lub drugim produkcie dostawcy. Niektórzy sprzedawcy nawet używać różnych form w ramach własnych linii produktów. Więcej informacji można znaleźć w tym artykule.
I chociaż różne formy są równie zdolne, każda z nich musi być dostrojona (należy określić wartości regulowanych parametrów) przy użyciu korelacji dostrajania zaprojektowanych specjalnie dla danego algorytmu sterowania.
Komercyjne oprogramowanie ułatwia uzyskanie pożądanej wydajności z każdego z nich. Jednak konieczna jest znajomość dostawcy i numeru modelu sterownika, aby zapewnić prawidłowe dopasowanie formy sterownika do obliczonych wartości dostrojenia.
Alternatywą dla uporządkowanej metodologii projektowania jest podejście „zgaduj i testuj”. Chociaż stosowane przez niektórych praktyków, takie próbne i błędne strojenie marnuje cenny czas produkcji, zużywa więcej surowców i mediów niż jest to konieczne, generuje dodatkowe odpady i produkt poza specyfikacją, a nawet może stanowić zagrożenie dla bezpieczeństwa.
W większości artykułów na Controlguru.com, używamy jakiejś odmiany zależnej, idealnej formy regulatora PID:

Gdzie:
CO = sygnał wyjściowy regulatora
CObias = bias regulatora
e(t) = błąd bieżący regulatora, zdefiniowany jako SP – PV
SP = punkt nastawy
PV = mierzona zmienna procesowa
Kc = wzmocnienie regulatora, parametr strojenia
Ti = czas resetu, parametr strojenia
Td = czas pochodnej, parametr strojenia
Aby wzmocnić przekonanie, że wszystkie regulatory są równie zdolne, stosujemy czasami odmiany postaci zależnej, interakcyjnej:

Albo odmiany niezależnej postaci PID:

Myślenia końcowe
Powyższa dyskusja pomija niektóre z subtelnych różnic w postaci algorytmów, które możemy wykorzystać do poprawy wydajności sterowania. Szczegóły te poznamy w miarę postępów w nauce.
Na przykład, pochodna na błędzie zachowuje się inaczej niż pochodna na zmierzonej wartości PV. Jest to prawdą dla wszystkich algorytmów. Pochodna na błąd może „kopać” po krokach wartości zadanej i rzadko jest to uważane za pożądane zachowanie. Dlatego pochodna na PV jest zalecana do zastosowań przemysłowych.
A jeśli rozważasz samodzielne programowanie regulatora, to nie forma algorytmu jest wyzwaniem. Dużą przeszkodą jest właściwe uwzględnienie logiki anti-reset windup i jacketing, aby umożliwić bezbolesne przechodzenie między trybami pracy.